 OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banane
Google - Gemini, Nano Banane Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok Deepseek
Deepseek Alibaba - Qwen
Alibaba - Qwen ByteDance – Das Beste von ByteDance
ByteDance – Das Beste von ByteDance Alle Modelle
Alle Modelle Unternehmenspläne
Unternehmenspläne KI-Anwendungsentwicklung
KI-Anwendungsentwicklung KI-Übersetzer-API
KI-Übersetzer-API KI-SEO/GEO-Dienst
KI-SEO/GEO-Dienst Geooptimierter PR-Service
Geooptimierter PR-Service Web-Scraping-Dienst
Web-Scraping-Dienst OpenClaw
OpenClaw Die besten KI-Tools
Die besten KI-Tools Top-KI-Roboter
Top-KI-Roboter
 Einloggen
Einloggen









Wie Ai2 virtuelle Simulationsdaten zur Entwicklung fortschrittlicher physikalischer KI-Systeme nutzt
Virtuelle Simulationsdaten Ist Beschleunigung des Fortschritts der physikalischen KI innerhalb von Unternehmensumgebungen, angeführt von Initiativen wie Ai2s MolmoBotDie
Die Steuerung von Hardware zur Interaktion mit der realen Welt hing historisch gesehen davon ab, kostspielige, manuell gesammelte DemonstrationenDie meisten Technologieanbieter, die allgemeine Manipulationsagenten entwickeln, stützen sich beim Aufbau dieser Systeme auf umfangreiche Trainingsdaten aus der realen Welt.
Um den Kontext zu verdeutlichen: Projekte wie DROIDE versammelt 76.000 ferngesteuerte Flugbahnen in 13 Institutionen – insgesamt etwa 350 Stunden menschlicher ArbeitskraftÄhnlich verhält es sich mit Google DeepMind. RT-1 erforderlich 130.000 Episoden wurden über 17 Monate gesammelt. durch menschliche Bediener. Diese Abhängigkeit von proprietärer, manueller Datenerfassung erhöht die Forschungskosten und konzentriert die Kompetenzen in einer begrenzten Anzahl gut finanzierter Industrielabore.
Ali Farhadi, CEO von Ai2, betont die Mission: „Unsere Mission ist es, KI zu entwickeln, die die Wissenschaft voranbringt und die Grenzen des menschlichen Entdeckungsvermögens erweitert.“ Er fährt fort: „Robotik kann zu einem grundlegenden wissenschaftlichen Instrument werden.“Sie helfen Forschern, Fortschritte zu beschleunigen und neue Fragestellungen zu erforschen. Um dies zu erreichen, müssen Systeme effektiv auf reale Szenarien generalisieren und Werkzeuge bereitstellen, die globale Forschungsgemeinschaft Darauf kann gemeinsam aufgebaut werden. Der erfolgreiche Transfer von der Simulation in die Realität ist ein entscheidender Meilenstein.“
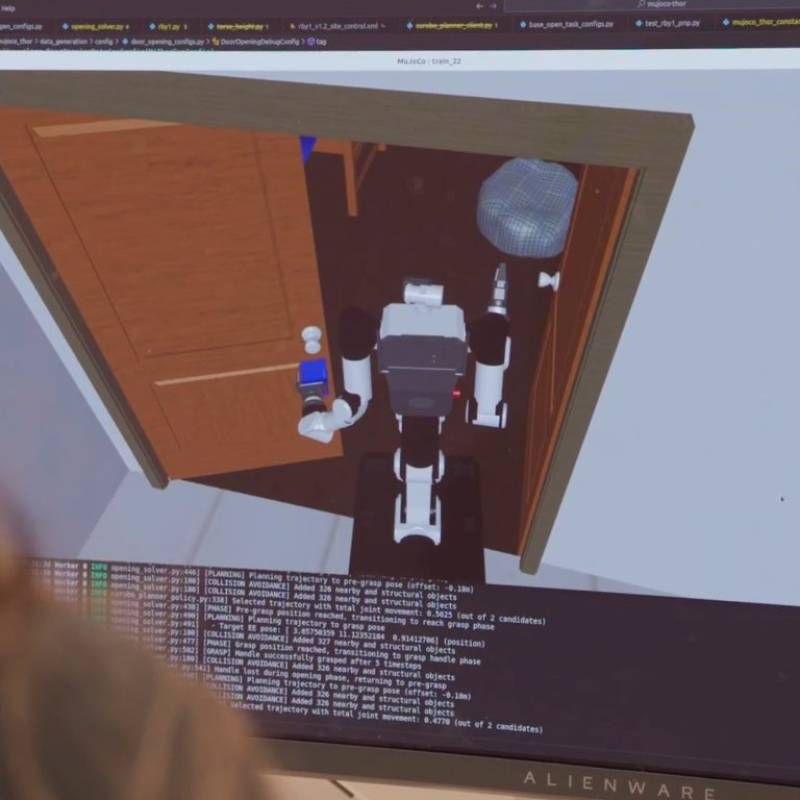
Forscher an der Allen Institute for AI (Ai2) ein neuartiges Wirtschaftsmodell vorschlagen durch MolmoBot - ein offene Modellsuite für robotergestützte Manipulation Ausschließlich mit synthetischen Daten trainiert. Durch prozedurale Generierung von Trajektorien innerhalb einer virtuellen Umgebung namens MolmoSpacesDadurch entfällt für das Team praktisch die Notwendigkeit einer manuellen Fernsteuerung.
Der dazugehörige Datensatz, MolmoBot-Datenenthält eine erstaunliche 1,8 Millionen Manipulationsverläufe von ExpertenDieser Datensatz wurde durch die Kombination der MuJoCo-Physik-Engine mit robusten Domänenrandomisierungstechniken erzeugt, die Objekte, Blickwinkel, Beleuchtung und Dynamik variieren.
Ranjay Krishna, Direktor des PRIOR-Teams bei Ai2, erläutert ihren innovativen Ansatz: „Die meisten Methoden versuchen, die Diskrepanz zwischen Simulation und Realität durch das Hinzufügen weiterer realer Daten zu verringern. Wir hingegen setzen darauf, dass eine größere Vielfalt an simulierten Umgebungen, Objekten und Kameraperspektiven diese Diskrepanz drastisch verringert.“ Diese Weiterentwicklung verlagert die Beschränkungen der Robotik von der manuellen Datenerfassung hin zur Gestaltung effektiverer virtueller Welten –Eine Herausforderung, die mit der heutigen Technologie lösbar ist.
Hochvolumige Simulation für das Training physikalischer KI
Die genutzte Ausbildungspipeline 100 Nvidia A100 GPUs, was etwa 1.024 Episoden pro GPU-StundeDas entspricht über 130 Stunden Robotererfahrung für jede Stunde EchtzeitDie
Im Vergleich zur herkömmlichen Datenerhebung in der realen Welt liefert diese Methode nahezu vierfacher Datendurchsatz, wodurch der ROI des Projekts durch Verkürzung der Bereitstellungszyklen dramatisch verbessert wird.
MolmoBot Suite & Hardware-Kompatibilität
Die MolmoBot-Suite umfasst folgende Merkmale: drei verschiedene Politikklassen Bewertet auf zwei Plattformen:
- Rainbow Robotics RB-Y1 mobiler Manipulator
- Franka FR3 Tischroboterarm
Das primäre Modell verwendet ein Molmo2 Bild-Sprach-Backbone Das System integriert mehrere RGB-Bildzeitschritte und natürlichsprachliche Anweisungen, um Roboteraktionen effektiv zu steuern.
Optimierte Modelle für Edge-Umgebungen
Für Edge-Computing-Szenarien Mit begrenzten Ressourcen bietet Ai2 Folgendes:
- MolmoBot-SPOC: eine leichtgewichtige Transformatorrichtlinie mit reduzierter Parameteranzahl.
- MolmoBot-Pi0: basiert auf dem PaliGemma-Backbone und ist mit dem π0-Modell von Physical Intelligence kompatibel, um direkte Leistungsvergleiche zu ermöglichen.