OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banane
Google - Gemini, Nano Banane Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok Deepseek
Deepseek Alibaba - Qwen
Alibaba - Qwen ByteDance – Das Beste von ByteDance
ByteDance – Das Beste von ByteDance Alle Modelle
Alle Modelle Unternehmenspläne
Unternehmenspläne KI-Anwendungsentwicklung
KI-Anwendungsentwicklung KI-Übersetzer-API
KI-Übersetzer-API KI-SEO/GEO-Dienst
KI-SEO/GEO-Dienst Geooptimierter PR-Service
Geooptimierter PR-Service Web-Scraping-Dienst
Web-Scraping-Dienst OpenClaw
OpenClaw Die besten KI-Tools
Die besten KI-Tools Top-KI-Roboter
Top-KI-Roboter
 Einloggen
Einloggen


KI-Kerntechnologien
Großes Sprachmodell für
Allgemeine Aufgabenplanung
Durch die Nutzung der fortschrittlichen Planungsmodelltechnologie für allgemeine Aufgaben erlangt Walker S1 die Fähigkeit in Absichtsverständnis und AufgabenplanungDie innovativen Anwendungsmöglichkeiten und die Komplexität der Implementierung dieser Technologien zählen zu den führenden in der globalen Industrie.
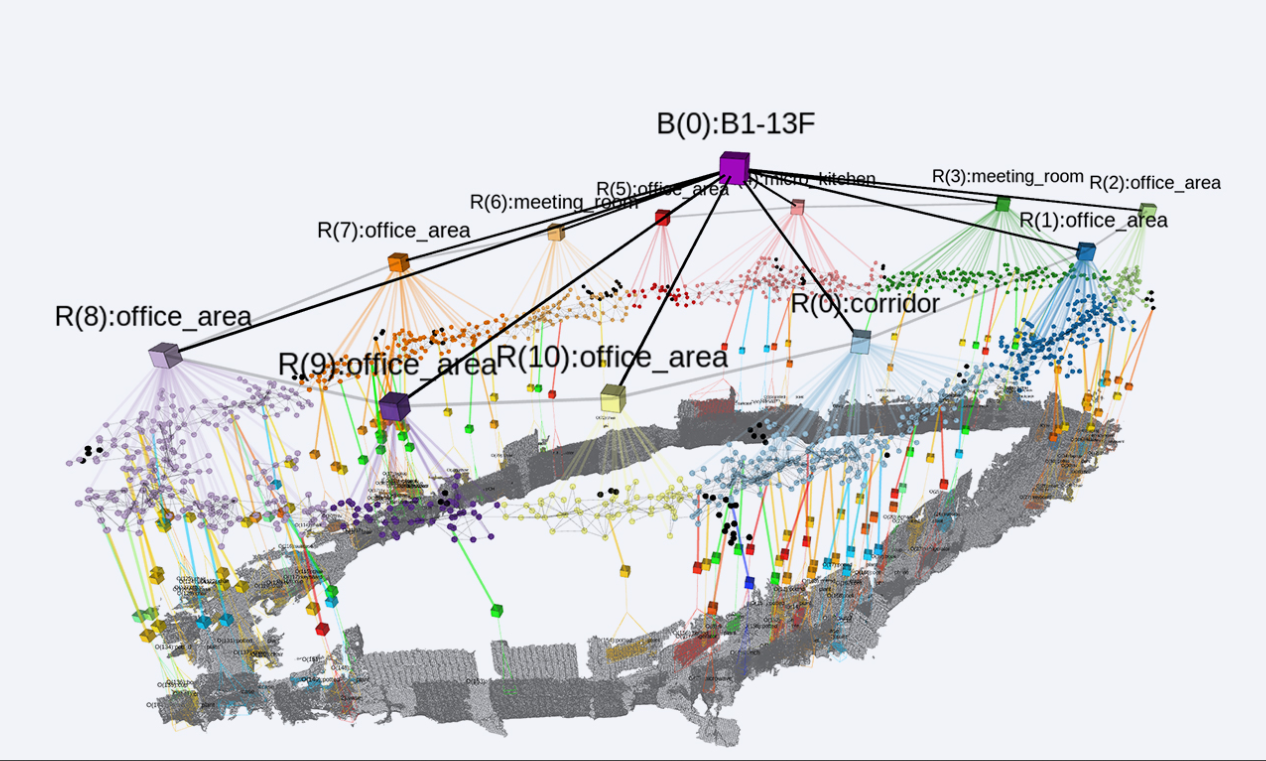
Semantische VSLAM-Navigation
Durch die Entwicklung einer eng gekoppelten Methode zur semantischen Wahrnehmung von Informationen und traditioneller VSLAM, ein zweistufige semantische Navigation verbessert die räumliche Auffassungsgabe des Walker S1 und erfüllt die Generalisierungsanforderungen in industriellen Szenarien.
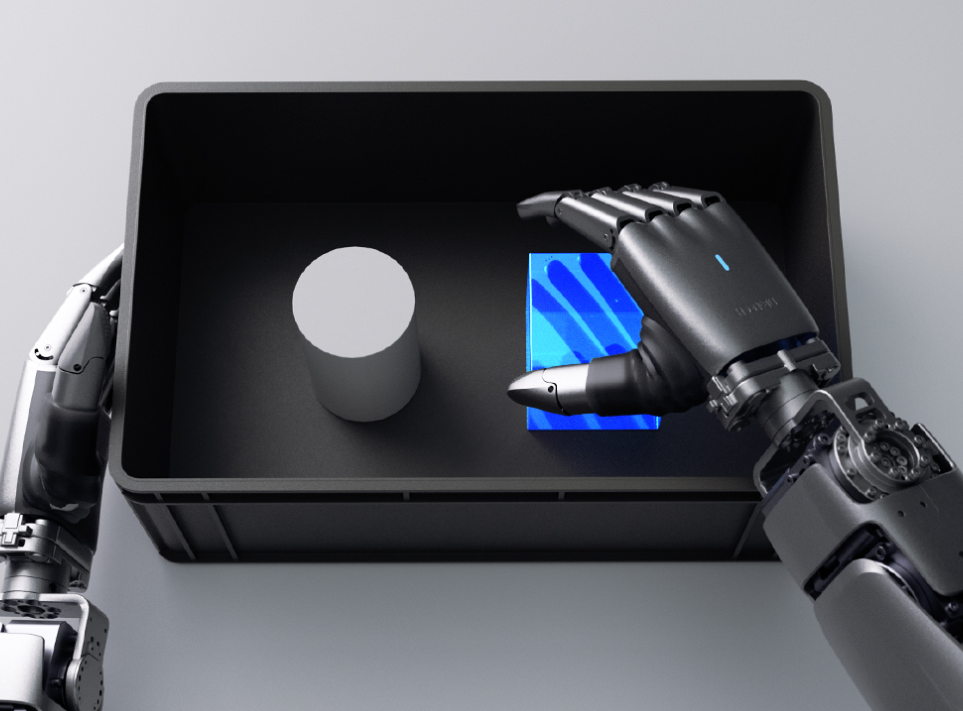
Lernbasiertes Ganzkörpertraining
Bewegungssteuerung
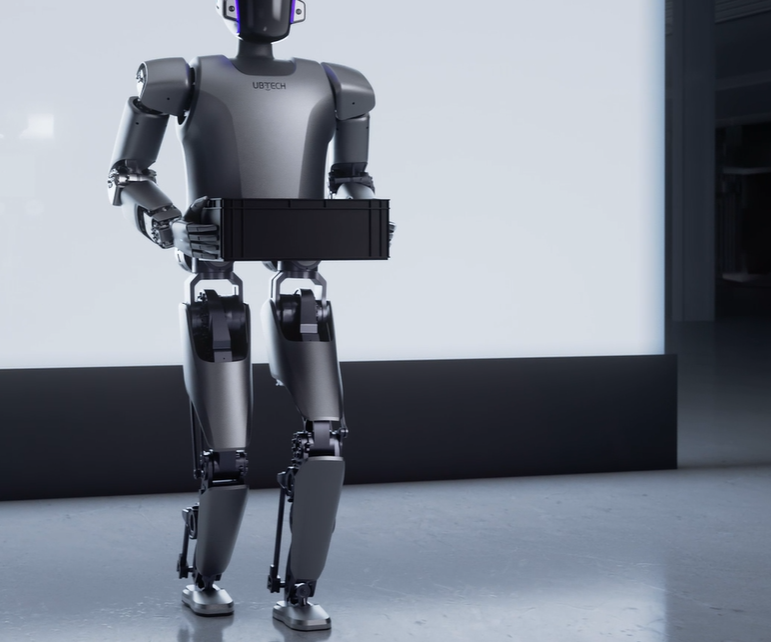
Das integrierte Wahrnehmungs- und Steuerungssystem sowie das durchgängige, lernbasierte Ganzkörper-Bewegungssteuerungssystem ermöglichen es Walker S1, Folgendes zu erreichen: Geschicklichkeit bei der Körpermanipulation und sicheres Gehenund verbessert so seine allgemeinen Ausführungsfähigkeiten für komplexe, unstrukturierte Aufgaben.
Lösung zentraler industrieller Herausforderungen
Walker S1 adressiert drei kritische Engpässe bei der Anwendung humanoider Roboter.

Visuelle Positionierung
Bewältigung von Problemen unter wechselnden Lichtverhältnissen und komplexen Umgebungsbedingungen.
Dynamische Bewegung
Lösung von Problemen mit Bewegungssteuerungsalgorithmen unter dynamischen Hochlastbedingungen.
Gelenkkühlung
Behandlung von Problemen mit der Gelenkkühlung bei Langzeitbetrieb unter hoher Belastung.
Humanoider Roboter
Anwendungslösung
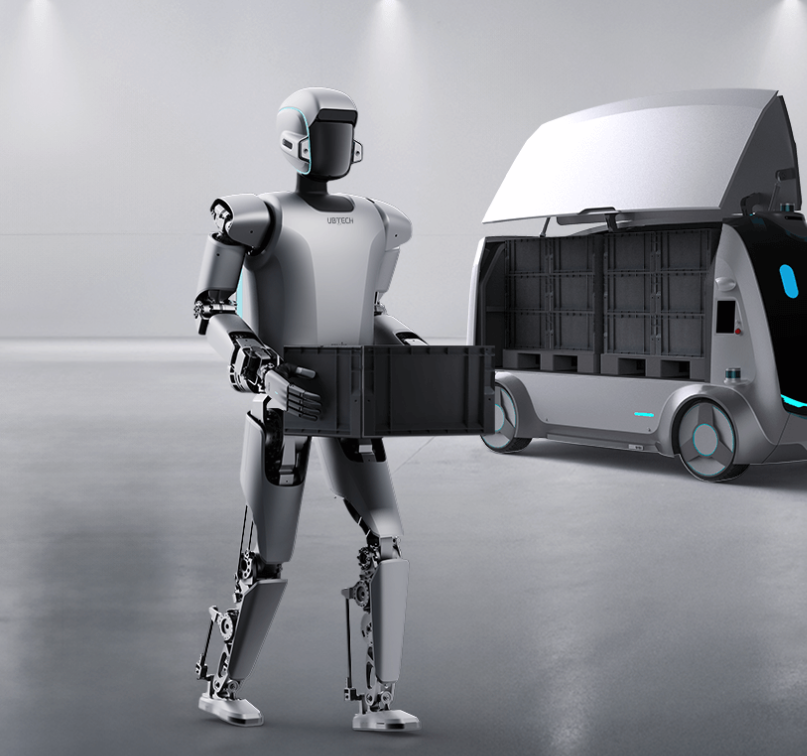
Walker S1 wurde in die Montagelinien der Fahrzeugfertigung eingeführt, um die Autoproduktion zu unterstützen und arbeitet dabei über intelligente Fertigungsmanagementsysteme mit autonomen Logistikfahrzeugen und AMRs/AGVs zusammen.

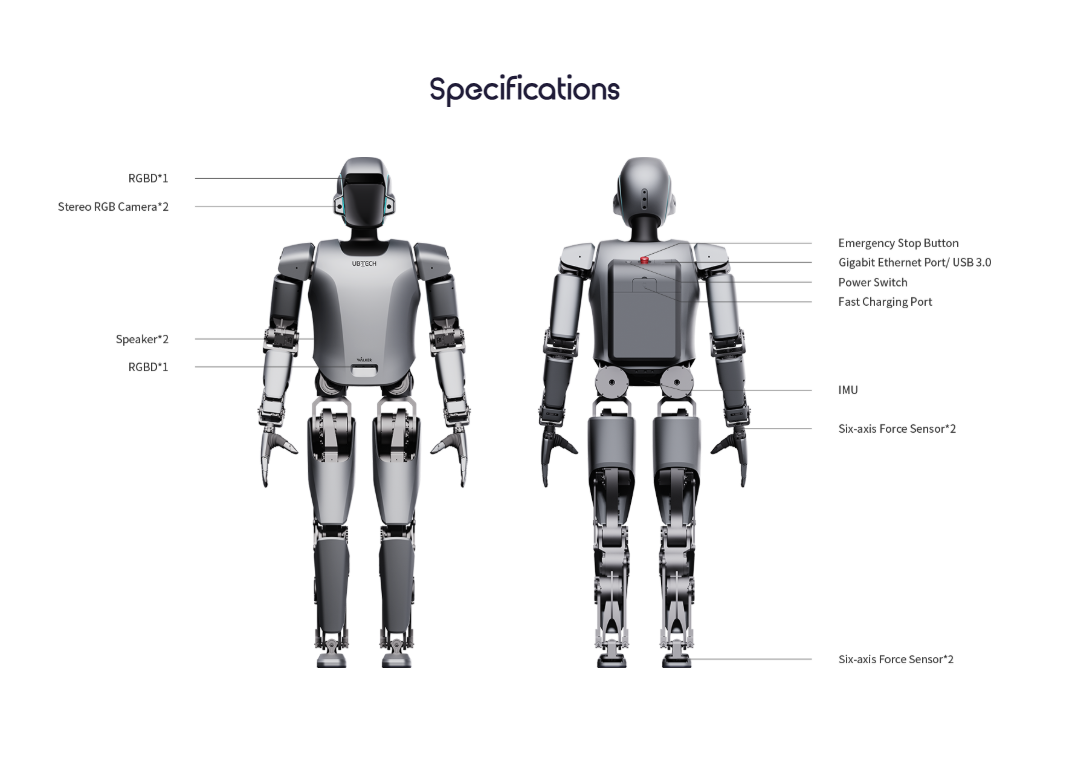
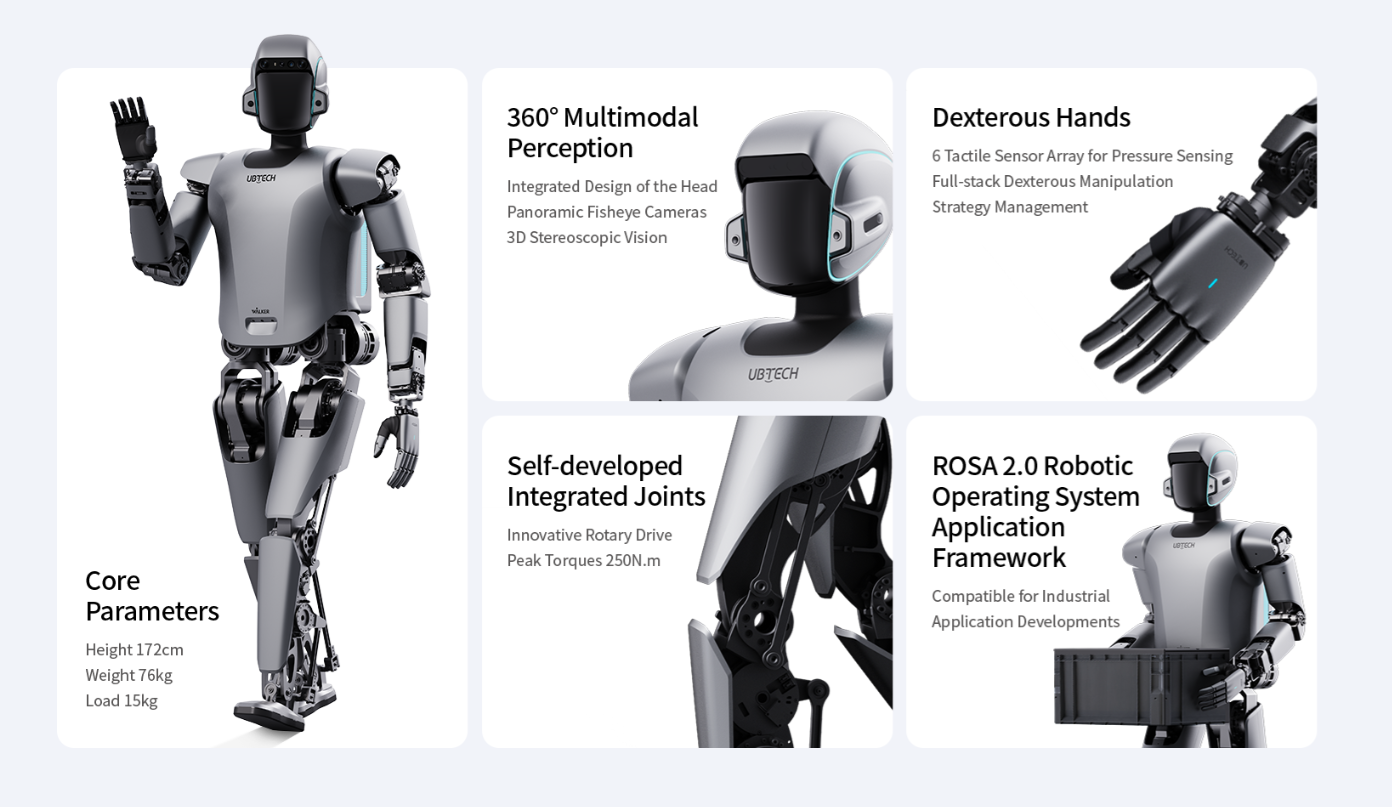
Technische Spezifikationen