 OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banane
Google - Gemini, Nano Banane Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok Deepseek
Deepseek Alibaba - Qwen
Alibaba - Qwen ByteDance – Das Beste von ByteDance
ByteDance – Das Beste von ByteDance Alle Modelle
Alle Modelle Unternehmenspläne
Unternehmenspläne KI-Anwendungsentwicklung
KI-Anwendungsentwicklung KI-Übersetzer-API
KI-Übersetzer-API KI-SEO/GEO-Dienst
KI-SEO/GEO-Dienst Geooptimierter PR-Service
Geooptimierter PR-Service Web-Scraping-Dienst
Web-Scraping-Dienst OpenClaw
OpenClaw Die besten KI-Tools
Die besten KI-Tools Top-KI-Roboter
Top-KI-Roboter
 Einloggen
Einloggen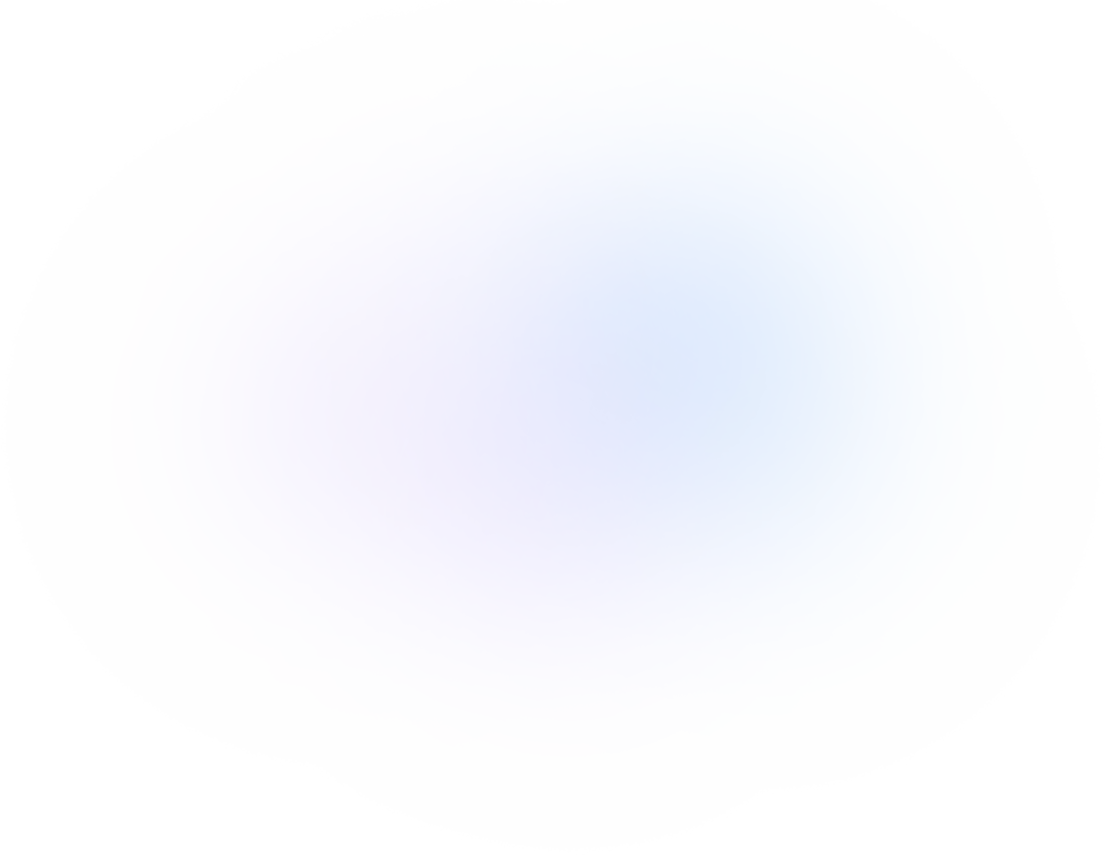






Beschreibung
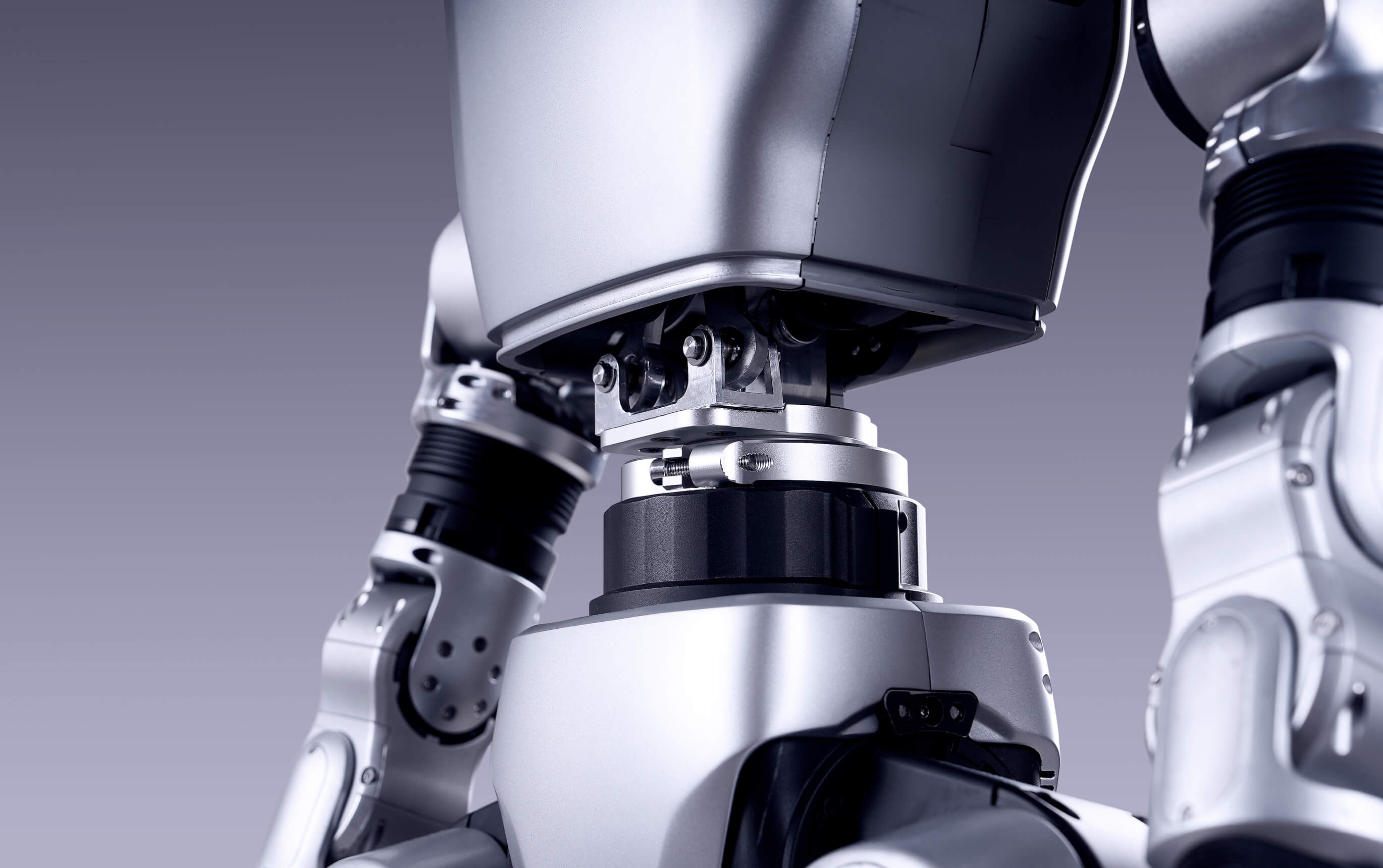
Der Unitree G1 ist ein kompaktes, hochflexibles humanoider Agenten-KI-Avatar Ein Roboter mit außergewöhnlicher Agilität, die die menschlichen Fähigkeiten übertrifft. Er verfügt über besonders große Gelenkbewegungsbereiche (23–43 Gelenkmotoren), eine hybride Kraft-Positions-Steuerung für präzise und zuverlässige Manipulation, KI-gestütztes Imitations- und Verstärkungslernen sowie das Roboterweltmodell UnifoLM. Er unterstützt kontinuierliche OTA-Upgrades und entwickelt sich dank KI-Beschleunigung kontinuierlich weiter. Ideal für Forschung, Lehre, Entwicklung und leichte Aufgaben.
Wichtigste technische Spezifikationen
| Parameter | G1 (Standard/Basis) | G1 EDU (Fortgeschrittenen-/Bildungsversion) |
|---|---|---|
| Höhe × Breite × Dicke (stehend) | 1320 × 450 × 200 mm | 1320 × 450 × 200 mm |
| Abmessungen im zusammengeklappten Zustand | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Gewicht (mit Batterie) | ≈ 35 kg | ≈ 35 kg+ (abhängig von der Konfiguration) |
| Gesamte Freiheitsgrade (DOF) | 23 | 23–43 (hochgradig konfigurierbar) |
| Einzelbein-Freiheitsgrad | 6 | 6 |
| Taillenfreiheitsgrad | 1 | 1 + optionales Extra 2 |
| Einzelarm-DOF | 5 | 5 |
| Einhand-DOF | Basic | Bis zu 7 Freiheitsgrade (Dex3-1 Drei-Finger-Kraftsteuerung der Hand: Daumen 3 aktive Freiheitsgrade, Zeige- und Mittelfinger je 2) + optional 2 Freiheitsgrade des Handgelenks; taktile Sensoren optional |
| Maximales Kniedrehmoment | 90 N·m | Bis zu 120 N·m |
| Maximale Nutzlast des Arms | ≈ 2 kg | ≈ 3 kg (variiert je nach Körperhaltung) |
| Beinlänge (Wade + Oberschenkel) | 0,6 m | 0,6 m |
| Armspannweite | ≈ 0,45 m | ≈ 0,45 m |
| Beispiele für den Gelenkbewegungsbereich | Taille Z±155° Knie 0°–165° Hüfte P±154°, R-30°~+170°, Y±158° | Gleiche Basis + zusätzliche Werte (z. B. Taille X±45°, Y±30°; Handgelenk P±92,5°, Y±92,5°) |
| Gelenktyp | Industrielle Kreuzrollenlager + schnelllaufende PMSM-Motoren mit geringer Massenträgheit | Dasselbe |
| Rechenleistung | Hochleistungs-CPU mit 8 Kernen | 8-Kern-CPU + NVIDIA Jetson Orin (hohe KI-Rechenleistung, bis zu 100–157 TOPS in einigen Konfigurationen) |
| Sensoren | Tiefenkamera + 3D-LiDAR-4-Mikrofon-Array | Gleiches + optionale erweiterte taktile Arrays |
| Audio | 5-Watt-Lautsprecher | 5-Watt-Lautsprecher |
| Konnektivität | WiFi 6 + Bluetooth 5.2 | WiFi 6 + Bluetooth 5.2 |
| Batterie | 9000mAh Lithium-Schnellladeakku (13S) | Dasselbe |
| Akkulaufzeit | ≈ 2 Stunden | ≈ 2 Stunden |
| Ladegerät | 54 V 5 A | 54 V 5 A |
| Kühlung | Lokale Luftkühlung | Lokale Luftkühlung |
| Weitere Merkmale | Kontinuierliche OTA-Updates, manueller Controller | Gleiches + vollständige Unterstützung für die Sekundärentwicklung (C/C++/Python, SDK, API) |
| Garantie | 8 Monate | 18 Monate |
| Zielnutzung | Allgemein / Einstiegslevel | Forschung, Bildung, fortgeschrittene KI und Entwicklung |
Notiz: Die Spezifikationen können je nach Konfiguration und Updates (insbesondere bei EDU-Versionen) leicht variieren. Der Roboter ist faltbar, leistungsstark und kompakt, dennoch sollten Benutzer aufgrund seiner starken Motoren und komplexen Struktur einen Sicherheitsabstand einhalten.