 OpenAI - ChatGPT、Sora
OpenAI - ChatGPT、Sora Google - Gemini,Nano Banana
Google - Gemini,Nano Banana Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok DeepSeek
DeepSeek 阿里巴巴 - Qwen
阿里巴巴 - Qwen 字节跳动 - 豆包
字节跳动 - 豆包 所有型号
所有型号 企业API定制计划
企业API定制计划 AI应用开发服务
AI应用开发服务 AI智能翻译API
AI智能翻译API AI SEO/GEO 服务
AI SEO/GEO 服务 GEO/AI大模型优化
GEO/AI大模型优化 网络爬虫服务
网络爬虫服务 OpenClaw
OpenClaw 顶级人工智能工具
顶级人工智能工具 顶级人工智能机器人
顶级人工智能机器人
 登录
登录

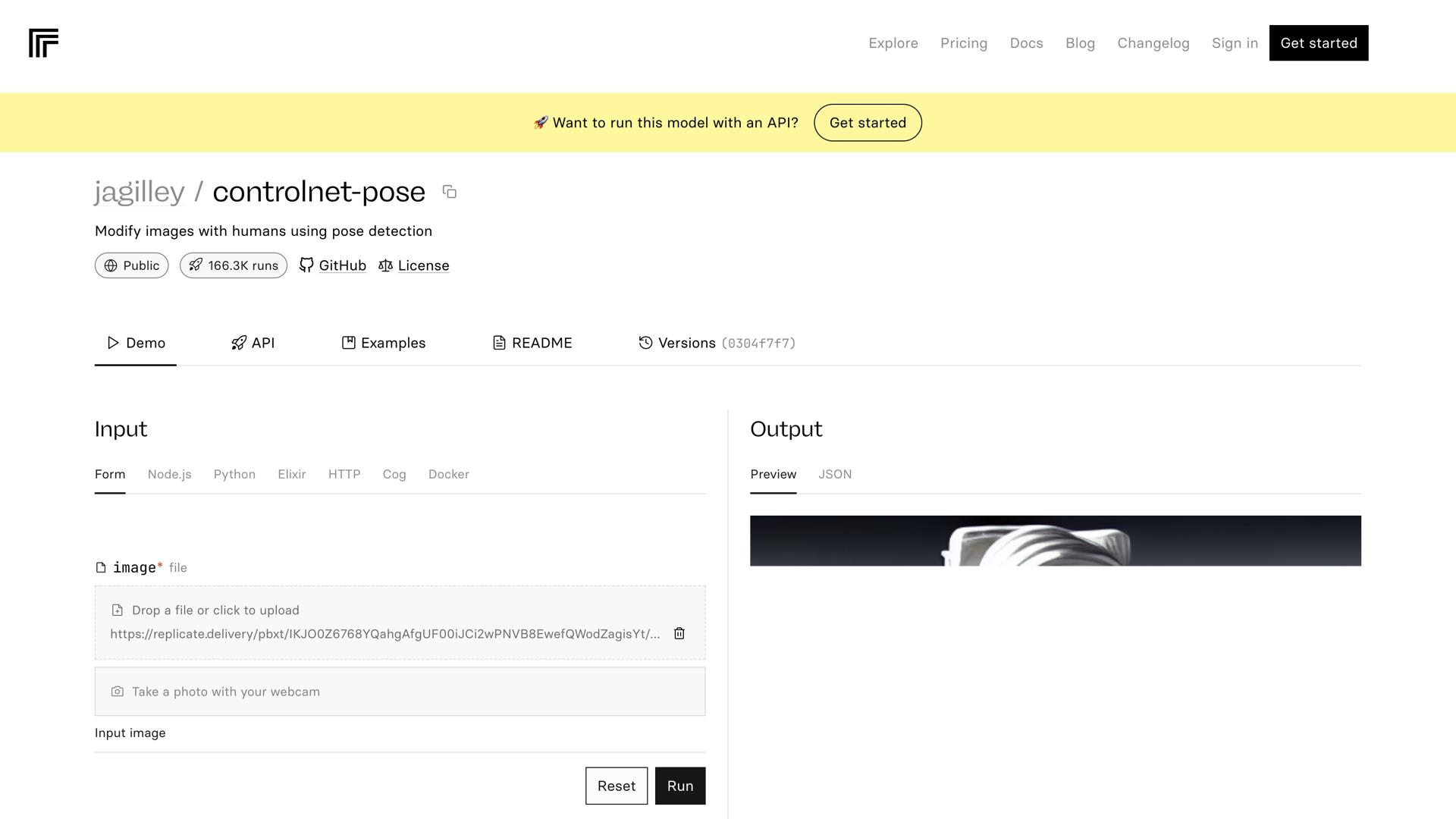
ControlNet Pose是什么?
ControlNet姿态 是一款革命性的软件,它为以下方面提供全面的解决方案: 控制和监控机器人系统的运动和位置这项强大的技术为用户在控制机器人时提供了无与伦比的精度、准确性和可靠性。借助 ControlNet Pose,用户可以轻松自信地编程和执行复杂的机器人任务。
该软件允许用户使用以下方式快速创建和调整动作和轨迹: 可视化编辑器它还配备了先进的算法,可以预测并应对环境中的意外变化,例如障碍物或意外物体,以确保机器人保持正确的轨道。此外,ControlNet Pose 还具有以下功能: 高度可扩展 可广泛应用于各种工业和消费领域。
ControlNet Pose 直观的用户界面和全面的功能集使其成为理想之选。 工程师、业余爱好者以及任何希望控制机器人系统的人凭借其易于使用的工具,用户可以轻松快速地设置、管理和监控机器人运动。
使用案例和功能
- 创建和调整机器人运动 使用可视化编辑器。
- 预判并调整 应对环境的意外变化。
- 迅速地 设置、管理和监控 机器人动作。
工具网站互动
上次更新:2年前
免责声明:统计数据来源于第三方供应商,准确性可能存在波动。
每月总访问量: 4M
跳出率: 45%
平均访问时长: 306.13秒
每次访问浏览页数: 5.62
国家排名: 356
全球排名: 11,175
月流量
流量来源
按国家/地区划分的流量份额
印度: 7.94%
巴西: 7.52%
美国: 7.28%
印度尼西亚: 5.99%
火鸡: 4.95%