 OpenAI - ChatGPT、Sora
OpenAI - ChatGPT、Sora Google - Gemini,Nano Banana
Google - Gemini,Nano Banana Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok DeepSeek
DeepSeek 阿里巴巴 - Qwen
阿里巴巴 - Qwen 字节跳动 - 豆包
字节跳动 - 豆包 所有型号
所有型号 企业API定制计划
企业API定制计划 AI应用开发服务
AI应用开发服务 AI智能翻译API
AI智能翻译API AI SEO/GEO 服务
AI SEO/GEO 服务 GEO/AI大模型优化
GEO/AI大模型优化 网络爬虫服务
网络爬虫服务 OpenClaw
OpenClaw 顶级人工智能工具
顶级人工智能工具 顶级人工智能机器人
顶级人工智能机器人
 登录
登录










Ai2 如何利用虚拟仿真数据开发先进的物理人工智能系统
虚拟仿真数据 是 加速物理人工智能的发展 在企业环境中,以 Ai2 等公司为首的举措引领了这一趋势。 MolmoBot。
历史上,指导硬件与现实世界交互一直依赖于…… 成本高昂、人工收集的演示大多数开发通用操控代理的技术提供商都依赖大量的现实世界训练数据来构建这些系统。
为了提供背景信息,诸如此类的项目 机器人 聚集 76,000 条遥控轨迹 涉及13个机构——总计约 350 小时的人力劳动同样,GoogleDeepMind的 RT-1 必需的 17个月内收集了13万集 由人工操作。这种对专有、手动数据收集的依赖 增加研究成本 并将能力集中在少数资金充足的工业实验室中。
Ai2 首席执行官 Ali Farhadi 强调了公司的使命: “我们的使命是构建能够推动科学进步并拓展人类发现能力的AI。” 他继续说道: “机器人技术可以成为一项基础性的科学工具。”帮助研究人员加快研究进展并探索新的问题。为了实现这一目标,系统必须能够有效地推广到现实世界的场景,并提供相应的工具。 全球研究界 可以在此基础上进行协作。成功地将模拟结果转化为现实成果是一个至关重要的里程碑。
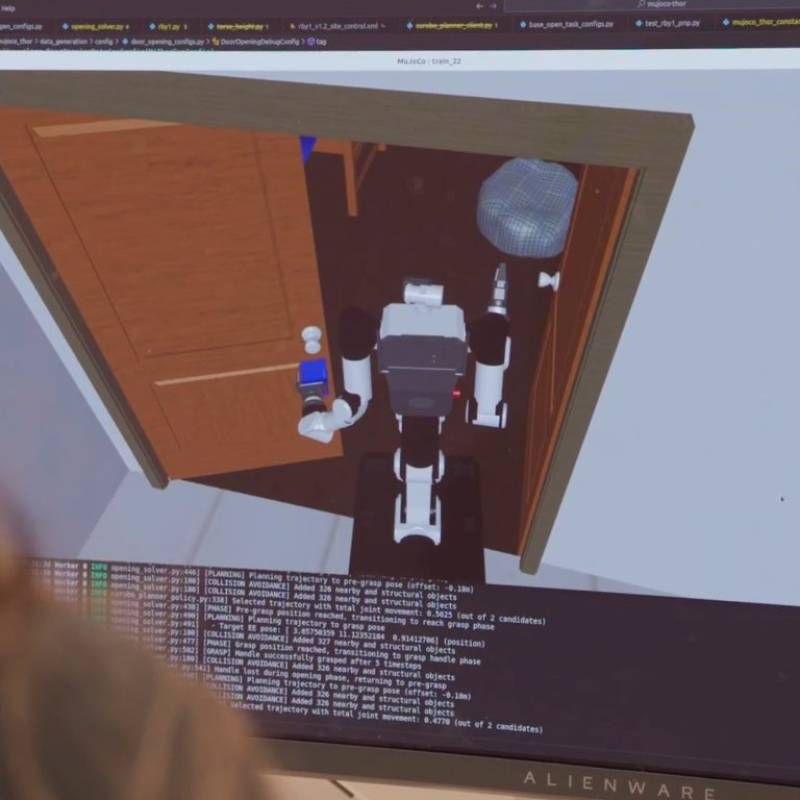
研究人员 艾伦人工智能研究所(Ai2) 通过以下方式提出一种新的经济模型 MolmoBot - 一个 开放式机器人操作模型套件 完全基于合成数据进行训练。通过在名为“虚拟环境”的环境中程序化生成轨迹” MolmoSpaces该团队有效地消除了手动远程操作的需要。
随附的数据集, MolmoBot-数据包含令人震惊的 180万条专家操控轨迹该数据集是通过将 MuJoCo 物理引擎与稳健的域随机化技术相结合而生成的,这些技术可以改变物体、视角、光照和动力学。
兰杰·克里希纳Ai2公司PRIOR团队的负责人解释了他们的创新方法: “大多数方法试图通过增加更多真实世界的数据来缩小模拟与现实之间的差距。但我们认为,增加模拟环境、物体和摄像机视角的多样性,才能显著缩小这一差距。” 这一进步将机器人技术的限制从手动演示数据采集转移到了设计更有效的虚拟世界——这是现有技术可以解决的难题。
用于物理人工智能训练的大规模模拟
所采用的训练流程 100块英伟达A100 GPU达到约 每GPU小时1024集这相当于超过 每1小时实时机器人操作需要130小时的机器人操作经验。。
与传统的现实世界数据收集方法相比,这种方法几乎可以产生 数据吞吐量提高了四倍通过缩短部署周期,显著提高项目投资回报率。
MolmoBot 套件及硬件兼容性
MolmoBot 套件的功能 三种不同的政策类别 基于两个平台进行评估:
- Rainbow Robotics RB-Y1 移动机械臂
- 弗兰卡 FR3 桌面机械臂
主要模型采用 Molmo2视觉语言骨干网 它整合了多个 RGB 图像时间步长和自然语言指令,以有效地控制机器人动作。
针对边缘环境的优化模型
为了 边缘计算场景 在资源有限的情况下,Ai2 提供:
- MolmoBot-SPOC:一种参数数量较少的轻量级 Transformer 策略。
- MolmoBot-Pi0:基于 PaliGemma 主干构建,与 Physical Intelligence 的 π0 模型保持一致,以便进行直接的性能比较。