OpenAI - ChatGPT、Sora
OpenAI - ChatGPT、Sora Google - Gemini,Nano Banana
Google - Gemini,Nano Banana Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok DeepSeek
DeepSeek 阿里巴巴 - Qwen
阿里巴巴 - Qwen 字节跳动 - 豆包
字节跳动 - 豆包 所有型号
所有型号 企业API定制计划
企业API定制计划 AI应用开发服务
AI应用开发服务 AI智能翻译API
AI智能翻译API AI SEO/GEO 服务
AI SEO/GEO 服务 GEO/AI大模型优化
GEO/AI大模型优化 网络爬虫服务
网络爬虫服务 OpenClaw
OpenClaw 顶级人工智能工具
顶级人工智能工具 顶级人工智能机器人
顶级人工智能机器人
 登录
登录


01020304
核心人工智能技术
大型语言模型
一般任务计划
通过运用先进的规划模型技术执行一般任务,Walker S1 获得了以下能力: 意图理解和任务规划这些技术的创新应用和实施复杂性在全球行业中名列前茅。
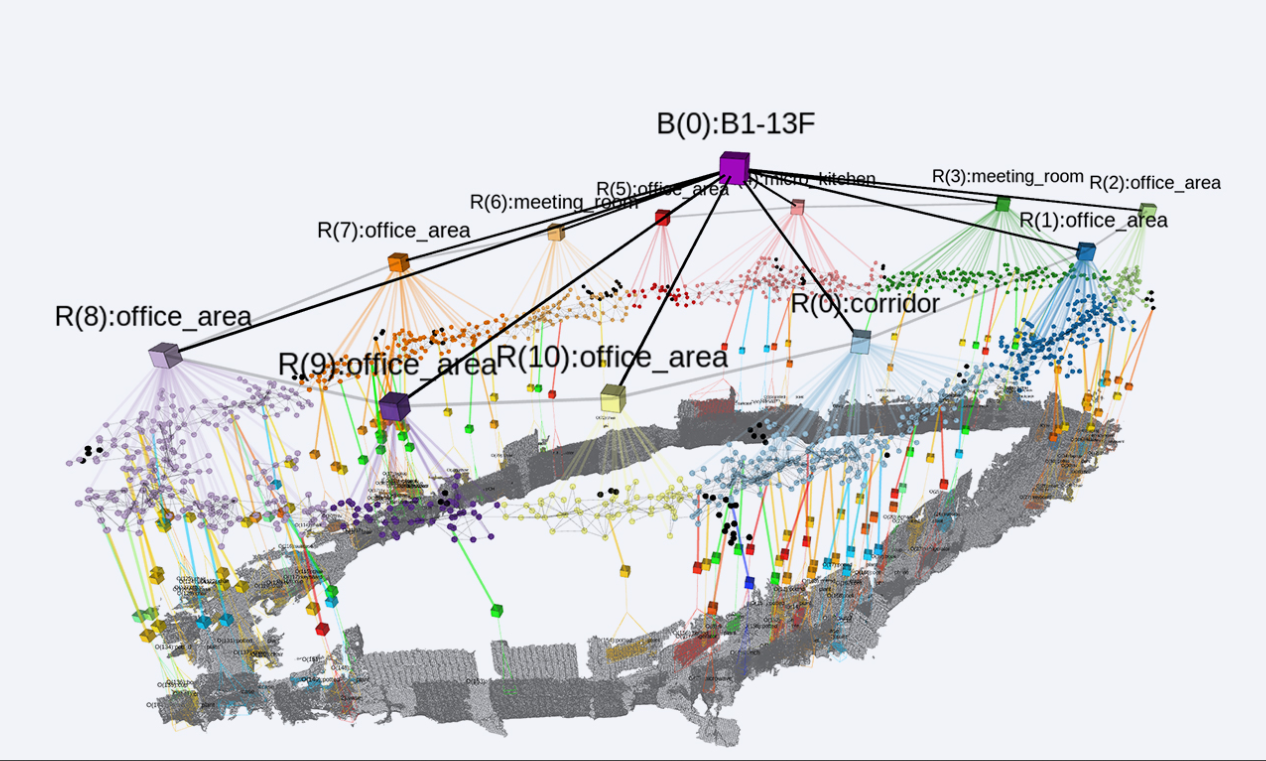
语义VSLAM导航
通过设计一种将语义感知信息与传统VSLAM紧密耦合的方法, 两阶段语义导航 提高了Walker S1的空间理解能力,满足了工业场景中的泛化需求。
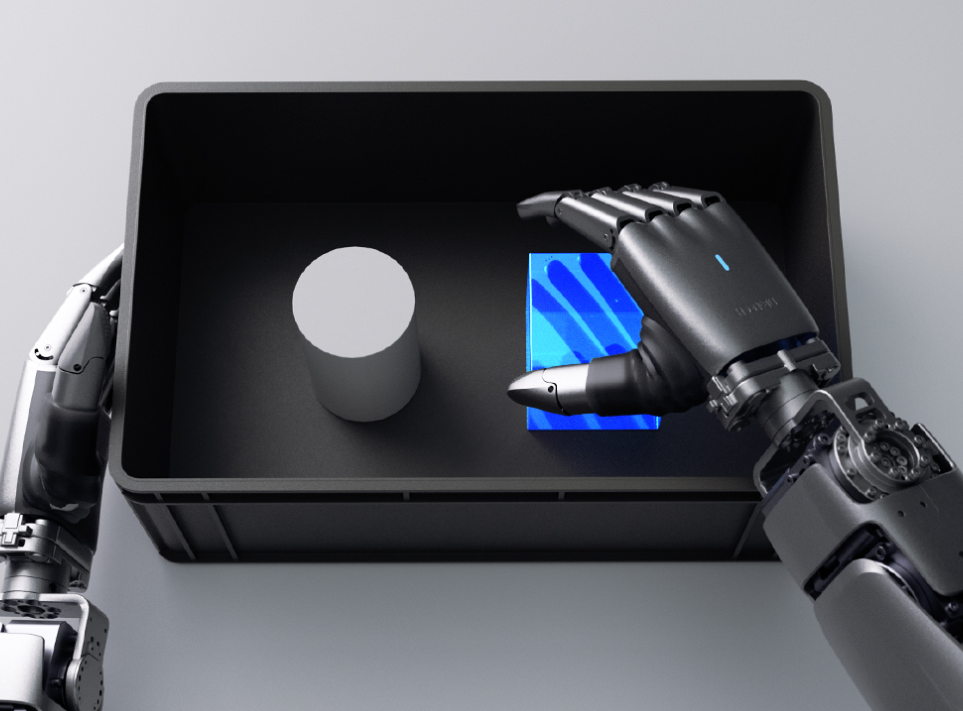
基于学习的全身
运动控制
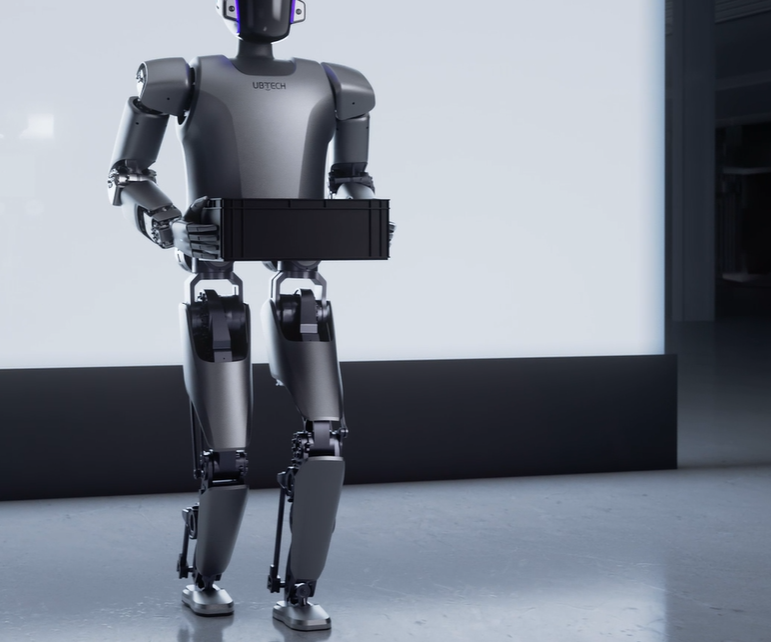
集成感知与控制、端到端学习的全身运动控制框架使Walker S1能够实现 灵巧的操作技能和稳定的行走能力增强其对复杂非结构化任务的通用执行能力。
解决关键工业挑战
Walker S1 解决了人形机器人应用中的三个关键瓶颈。

视觉定位
克服不同光照和复杂环境条件下的问题。
动态运动
解决动态高负载条件下的运动控制算法问题。
联合冷却
解决高负荷长期运行期间的接头冷却问题。
人形机器人
应用解决方案
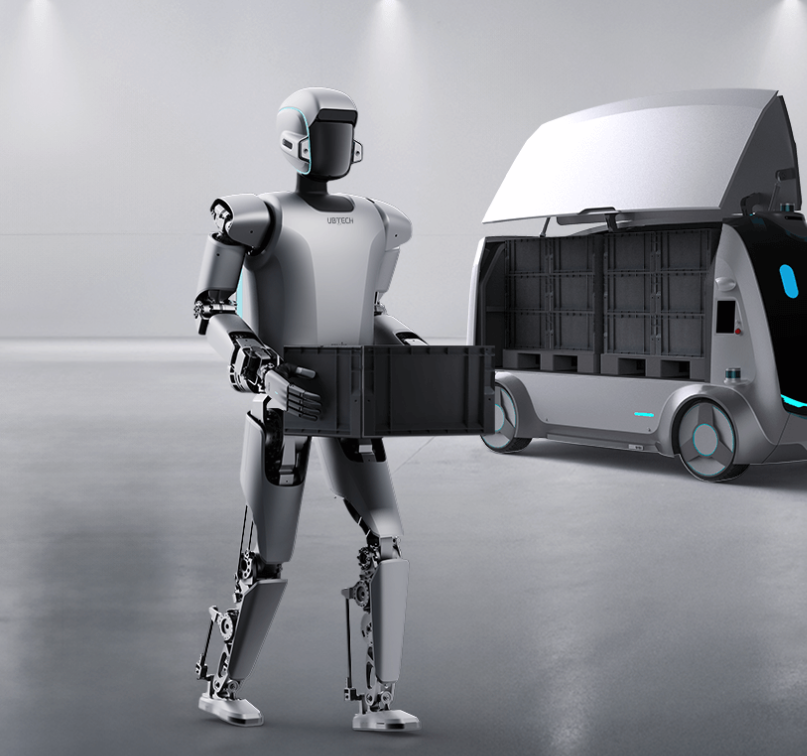
Walker S1 已引入汽车制造装配线,以协助汽车生产,通过智能制造管理系统与自主物流车辆和 AMR/AGV 协同工作。

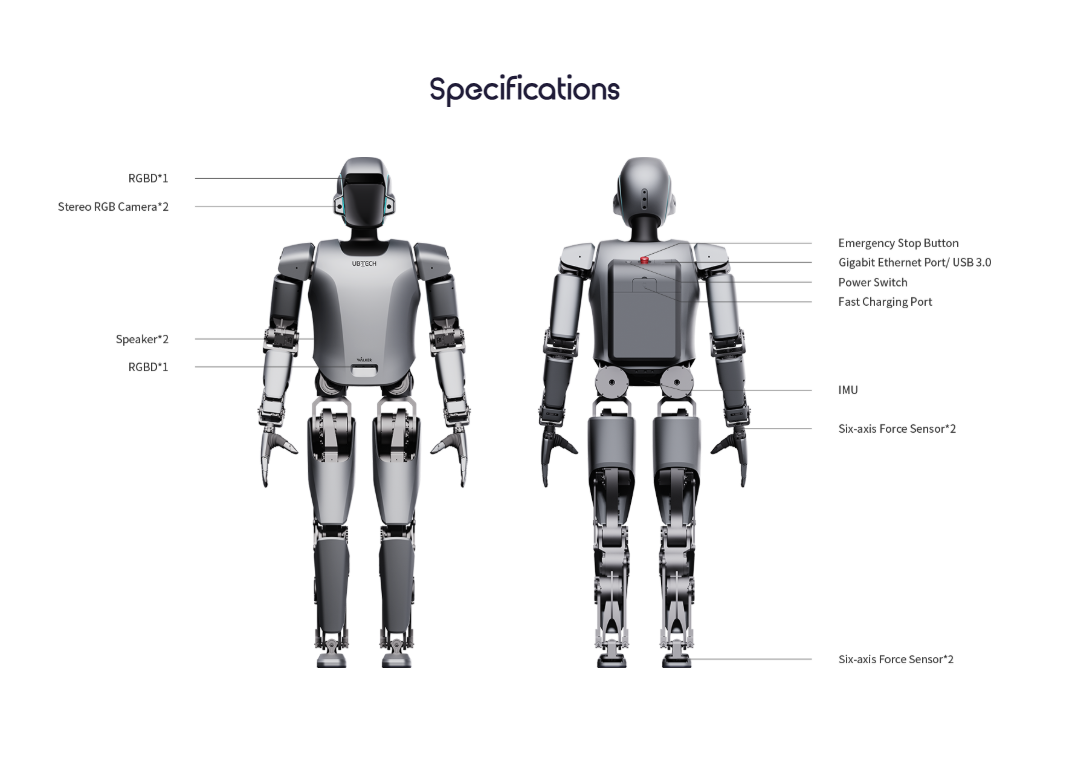
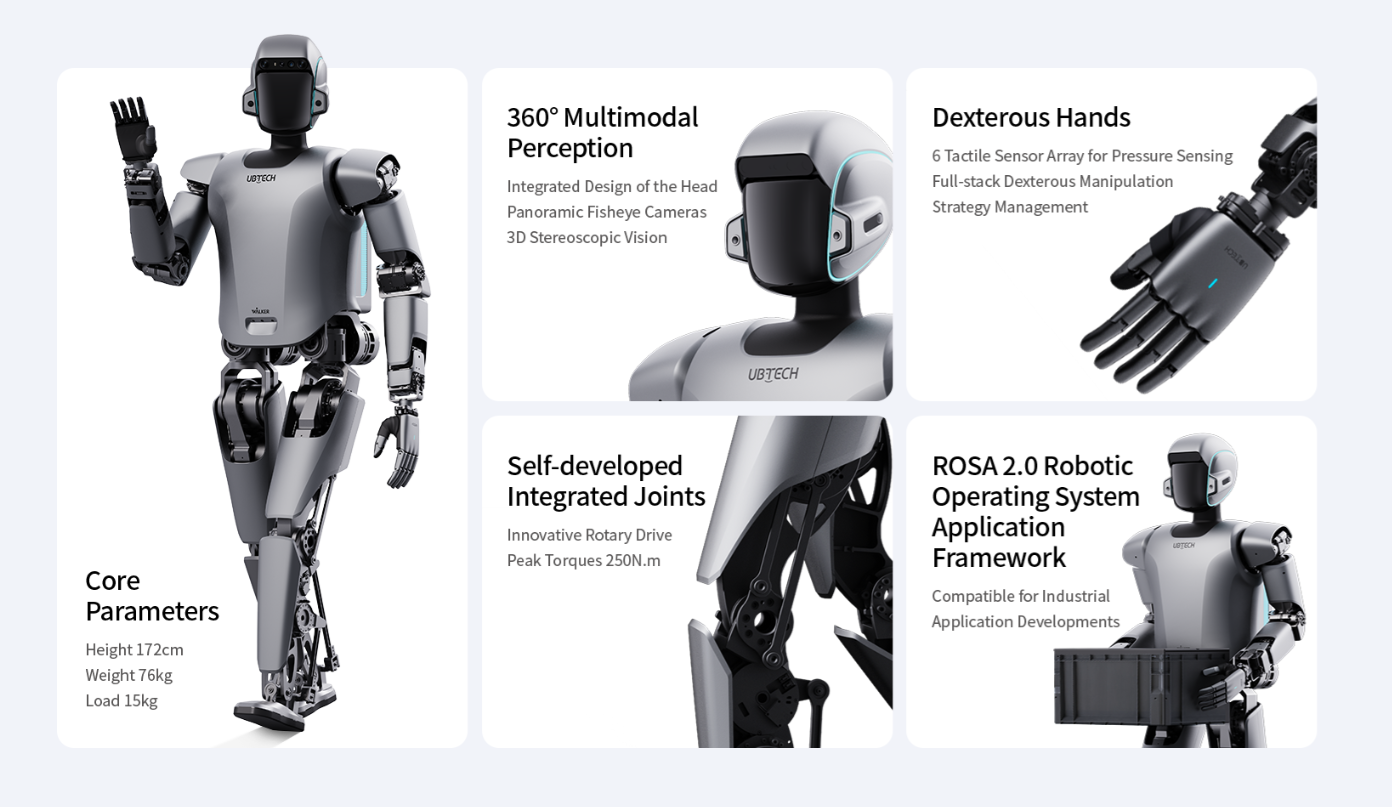
技术规格