OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Anthropic - Claude
Anthropic - Claude xAI - Grok
xAI - Grok Deepseek
Deepseek Alibaba - Qwen
Alibaba - Qwen ByteDance - Doubao
ByteDance - Doubao All Models
All Models Enterprise Plans
Enterprise Plans AI Application Development
AI Application Development AI Translator API
AI Translator API AI SEO/GEO Service
AI SEO/GEO Service GEO-Optimized PR Service
GEO-Optimized PR Service Web Scraping Service
Web Scraping Service OpenClaw
OpenClaw Top AI Tools
Top AI Tools Top AI Robots
Top AI Robots
 Log in
Log in


Core AI Technologies
Large Language Model for
General Task Planning
By utilizing the advanced planning model technology for general tasks, Walker S1 gains the ability in intention understanding and task planning. The innovative applications and the complexity of implementation of these technologies rank among the first tier in the global industry.
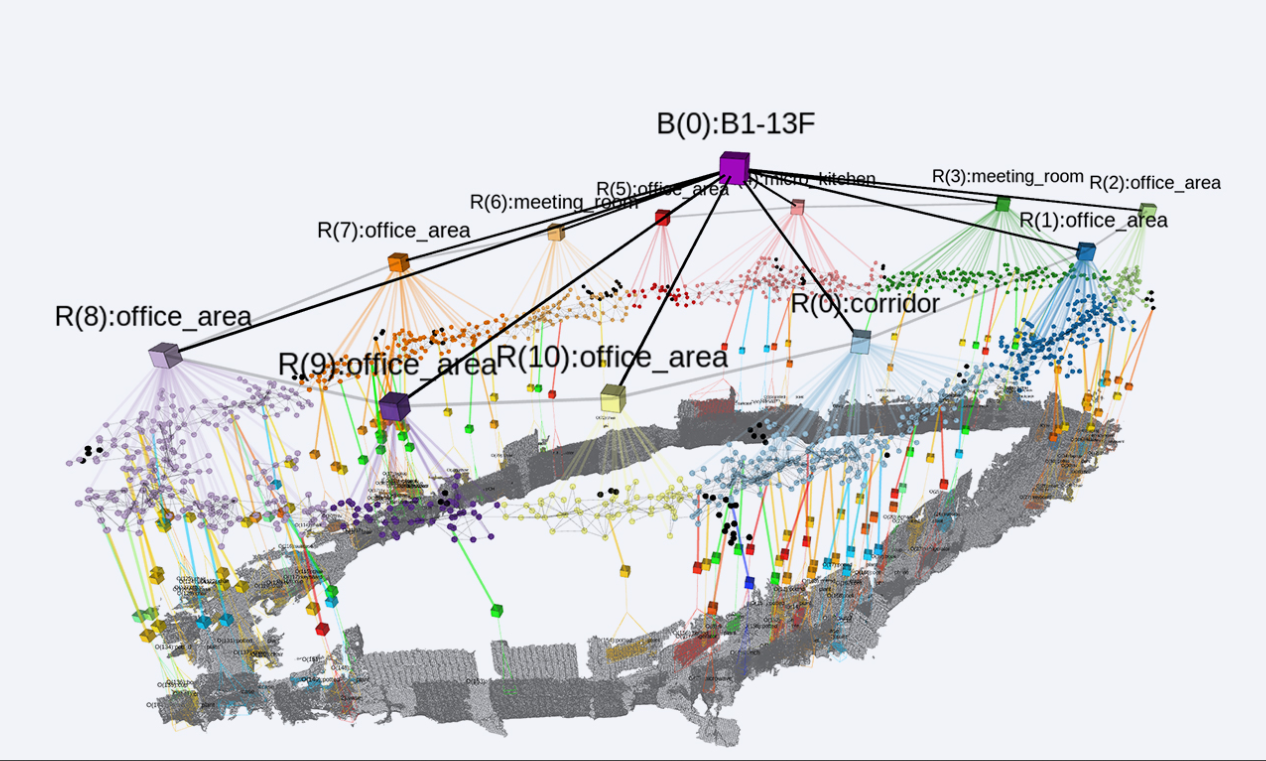
Semantic VSLAM Navigation
By designing a tightly coupled method of semantic perception information and traditional VSLAM, a two-stage semantic navigation improves Walker S1's spatial understanding ability and meets the generalization needs in industrial scenarios.
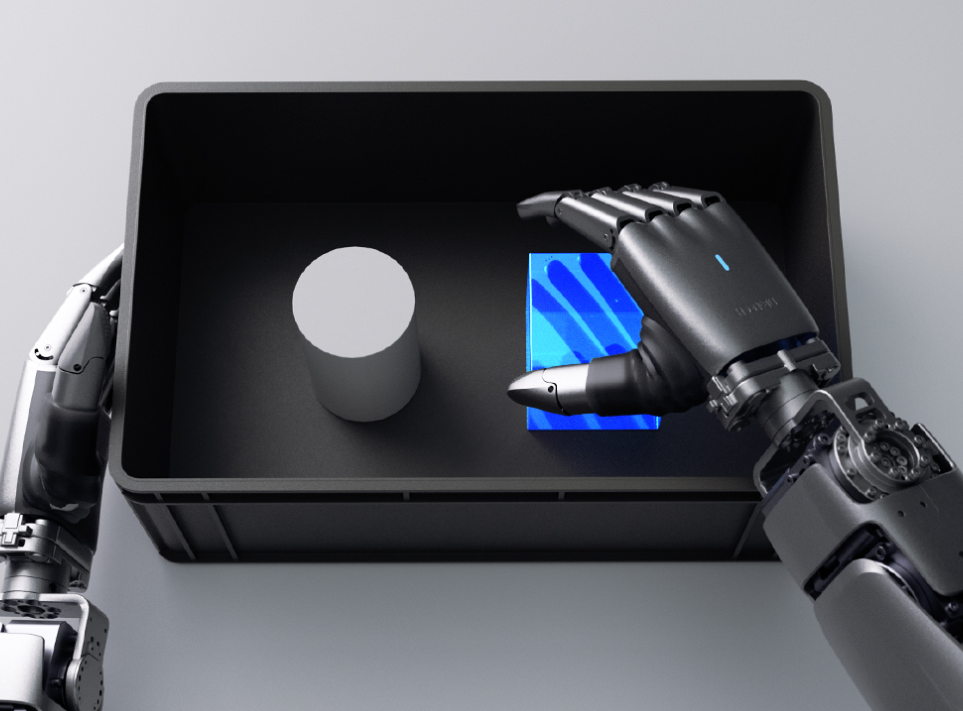
Learning-based Whole-body
Motion Control
The integrated perception and control, end-to-end learning-based whole-body motion control framework enable Walker S1 to achieve dexterous manipulations skills and stable walking abilities, enhancing its generalized execution capabilities for complex non-structured tasks.
Solving Key Industrial Challenges
Walker S1 addresses three critical bottlenecks in humanoid robot application.

Visual Positioning
Overcoming issues under varying lighting and complex environmental conditions.
Dynamic Motion
Solving motion control algorithm issues under dynamic high-load conditions.
Joint Cooling
Addressing joint cooling issues during long-term operation under high loads.
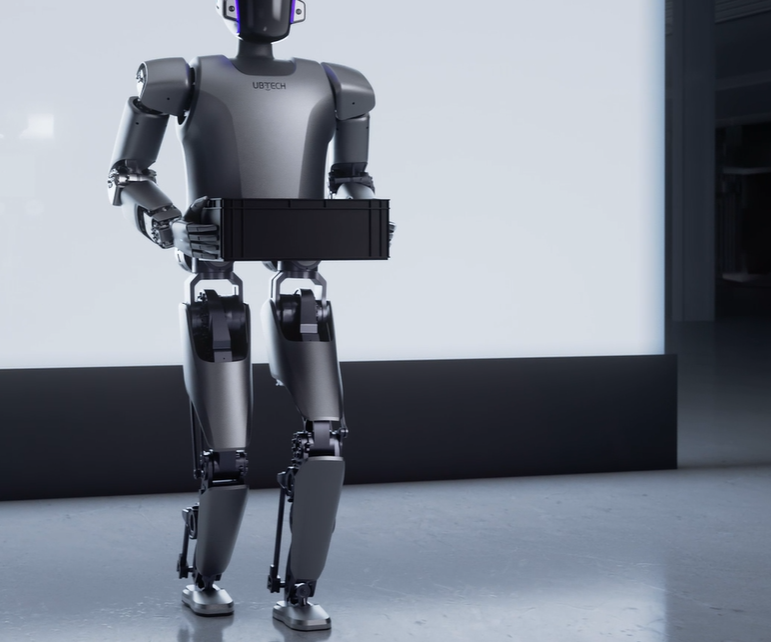
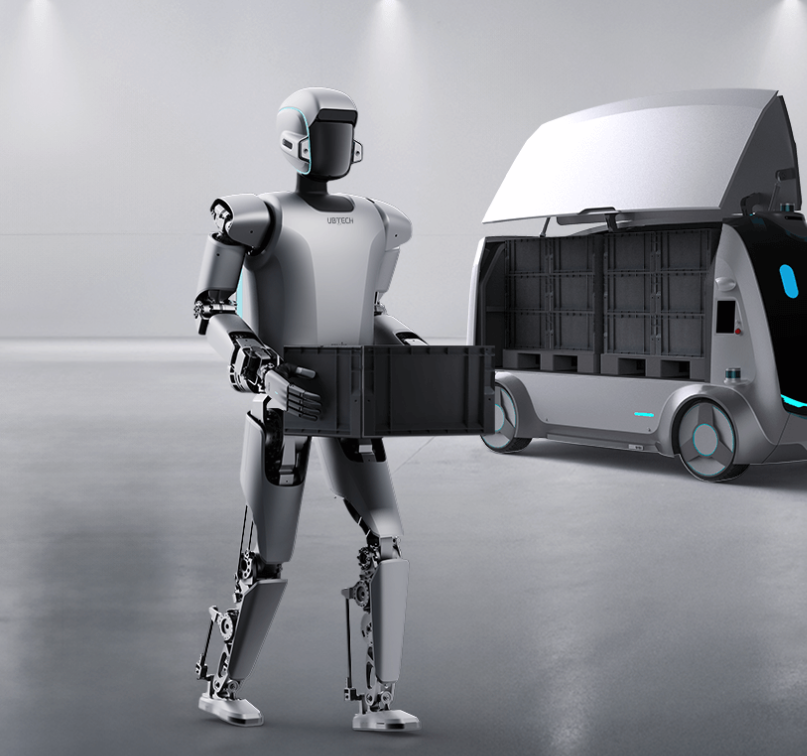
Humanoid Robot
Application Solution
Walker S1 has been introduced into vehicle manufacturing assembly lines to assist in car production, working collaboratively with autonomous logistics vehicles and AMRs/AGVs through smart manufacturing management systems.

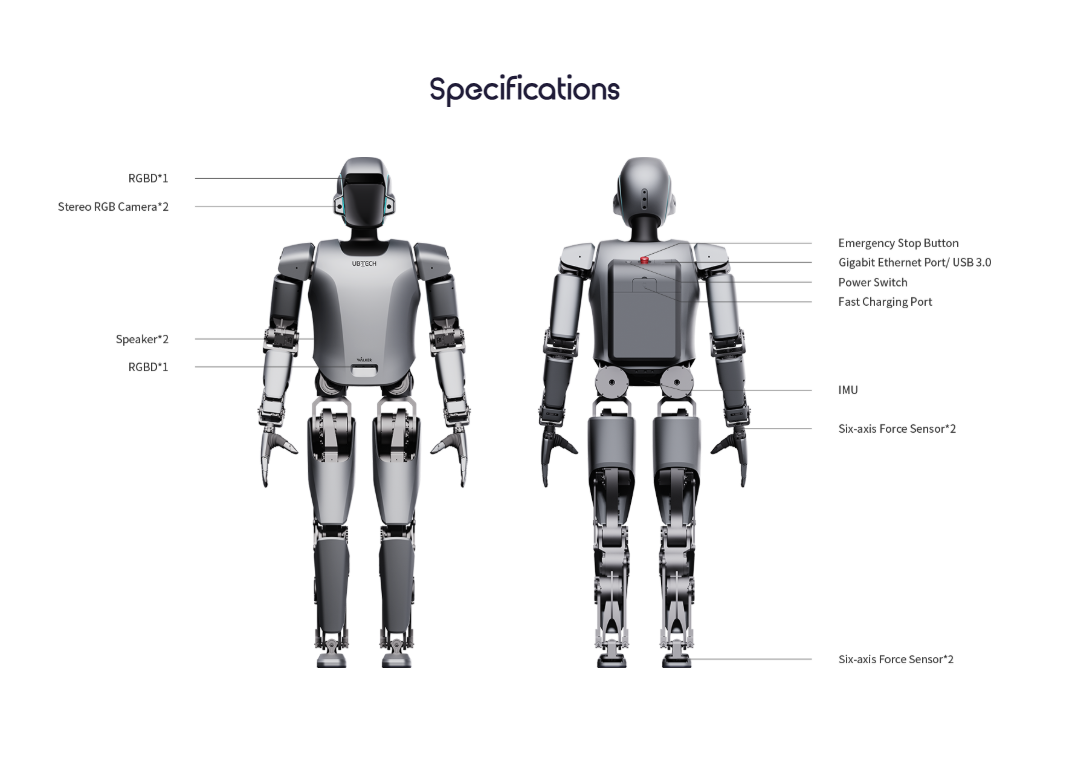
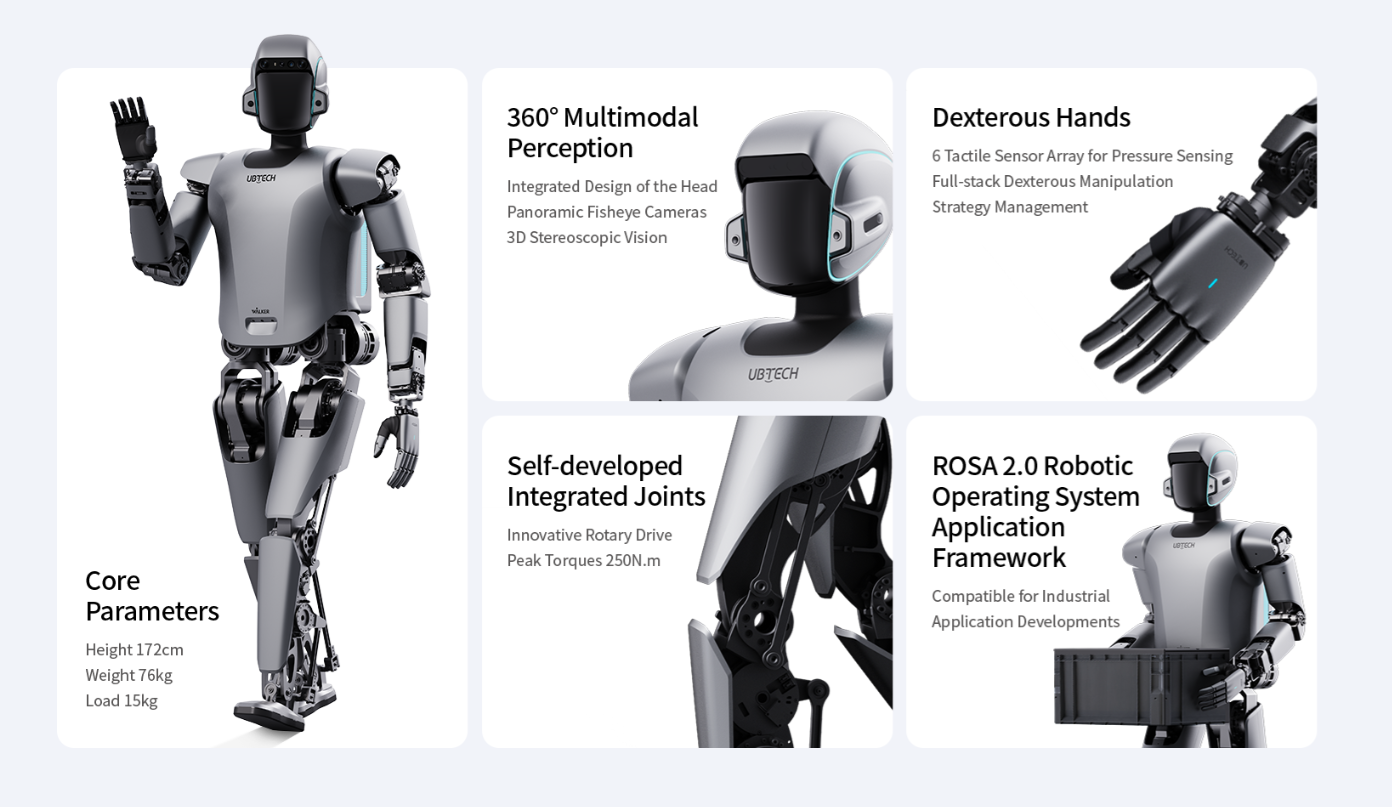
Technical Specifications