OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Anthropique - Claude
Anthropique - Claude xAI - Grok
xAI - Grok Recherche profonde
Recherche profonde Alibaba - Qwen
Alibaba - Qwen ByteDance - Le meilleur de ByteDance
ByteDance - Le meilleur de ByteDance Tous les modèles
Tous les modèles Plans d'entreprise
Plans d'entreprise Développement d'applications d'IA
Développement d'applications d'IA API de traduction IA
API de traduction IA Service SEO/GEO IA
Service SEO/GEO IA Service de relations publiques géo-optimisé
Service de relations publiques géo-optimisé Service de web scraping
Service de web scraping OpenClaw
OpenClaw Meilleurs outils d'IA
Meilleurs outils d'IA Les meilleurs robots IA
Les meilleurs robots IA
 Se connecter
Se connecter


Technologies d'IA fondamentales
Modèle de langage étendu pour
Planification générale des tâches
En utilisant la technologie de modélisation avancée des tâches générales, Walker S1 acquiert la capacité de compréhension des intentions et planification des tâchesLes applications innovantes et la complexité de la mise en œuvre de ces technologies les placent au premier rang de l'industrie mondiale.
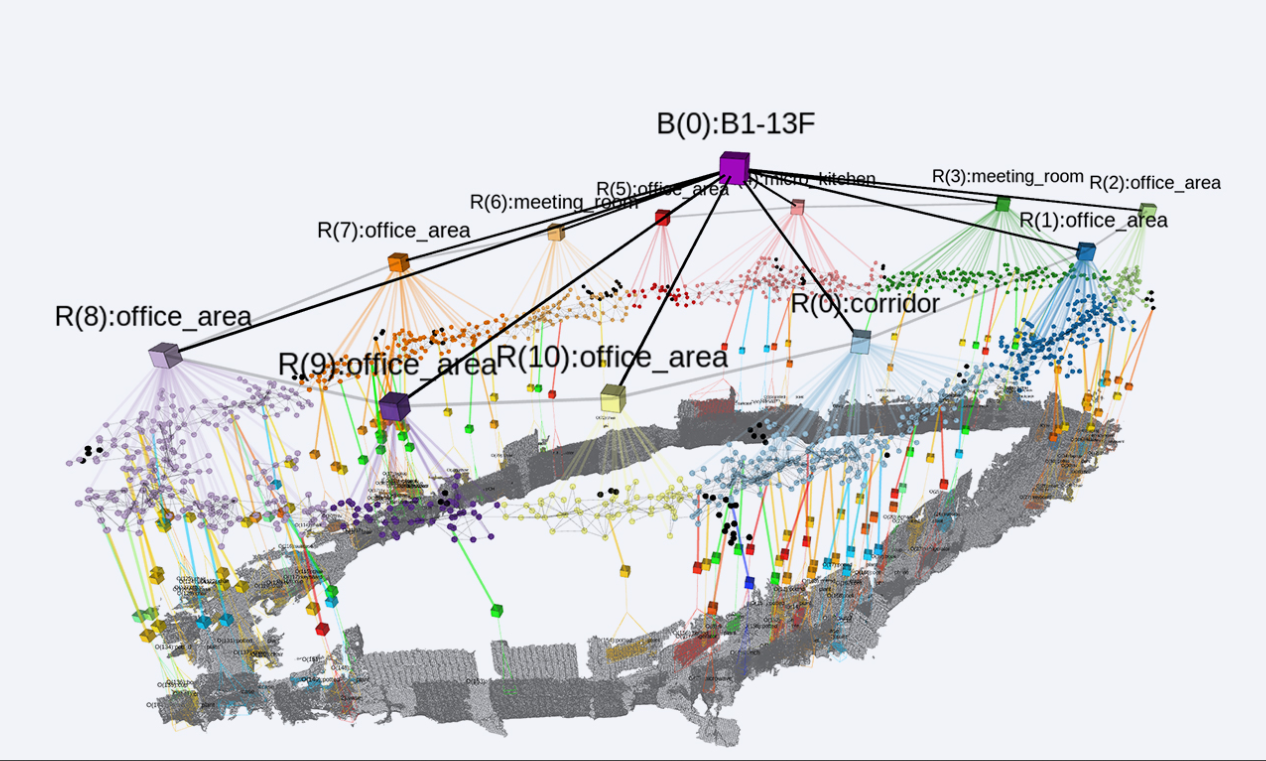
Navigation VSLAM sémantique
En concevant une méthode étroitement couplée d'information de perception sémantique et de VSLAM traditionnel, un navigation sémantique en deux étapes Améliore la capacité de compréhension spatiale de Walker S1 et répond aux besoins de généralisation dans les scénarios industriels.
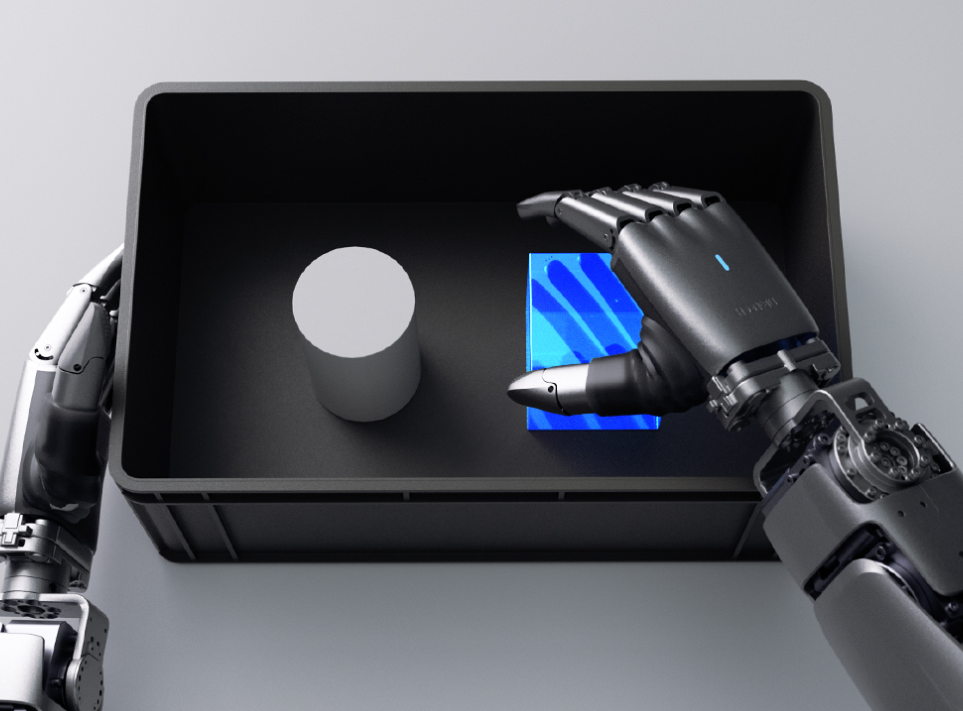
Apprentissage global du corps
Contrôle du mouvement
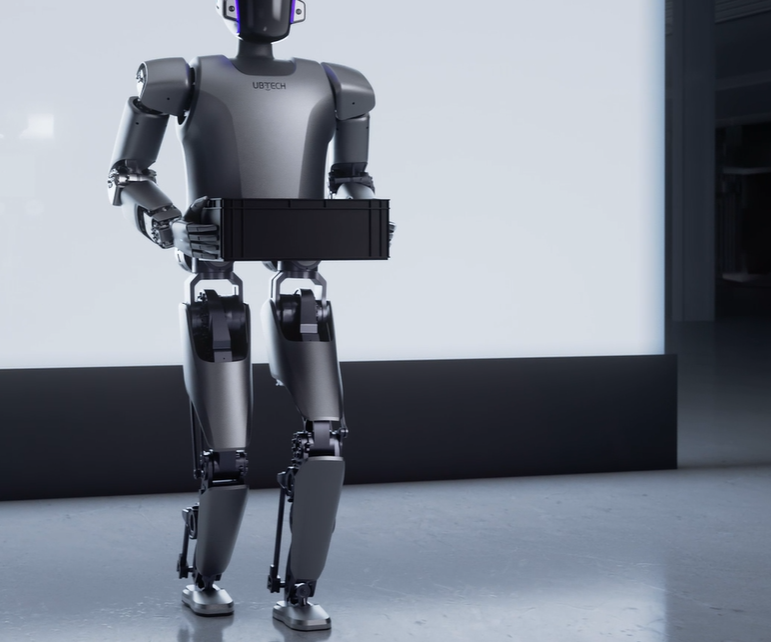
Le cadre de contrôle intégré des mouvements du corps entier, basé sur l'apprentissage de bout en bout et la perception et le contrôle intégrés, permet à Walker S1 d'atteindre dextérité manuelle et capacité de marche stable, améliorant ainsi ses capacités d'exécution généralisées pour les tâches complexes non structurées.
Résoudre les principaux défis industriels
Walker S1 s'attaque à trois goulots d'étranglement critiques dans l'application des robots humanoïdes.

Positionnement visuel
Surmonter les problèmes liés à des conditions d'éclairage variables et à des conditions environnementales complexes.
Mouvement dynamique
Résolution des problèmes liés aux algorithmes de contrôle de mouvement dans des conditions dynamiques de charge élevée.
Refroidissement conjoint
Résolution des problèmes de refroidissement des joints lors d'un fonctionnement prolongé sous charges élevées.
Robot humanoïde
Solution d'application
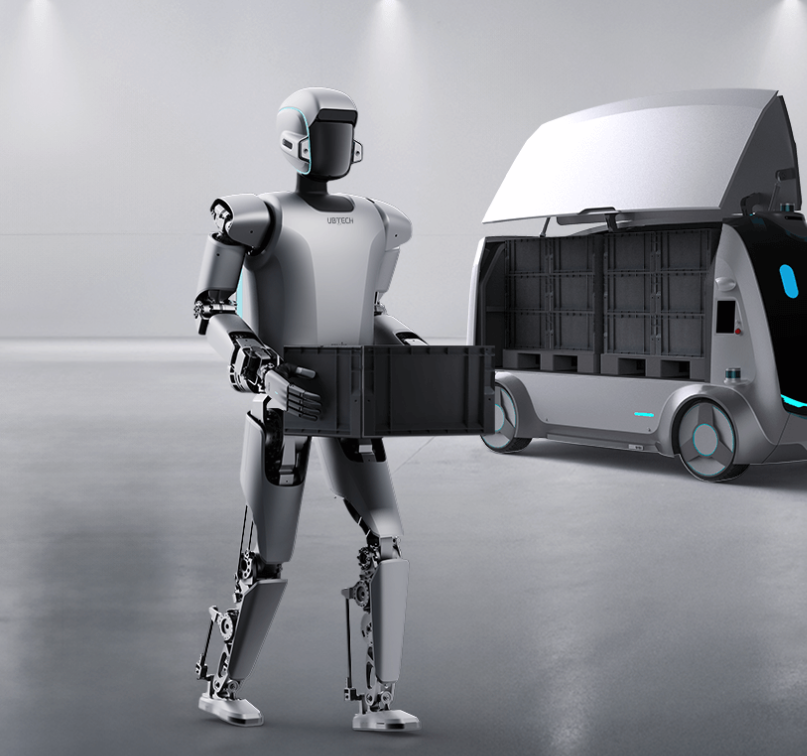
Le Walker S1 a été introduit dans les chaînes de montage de fabrication de véhicules pour aider à la production automobile, travaillant en collaboration avec des véhicules logistiques autonomes et des AMR/AGV grâce à des systèmes de gestion de fabrication intelligents.

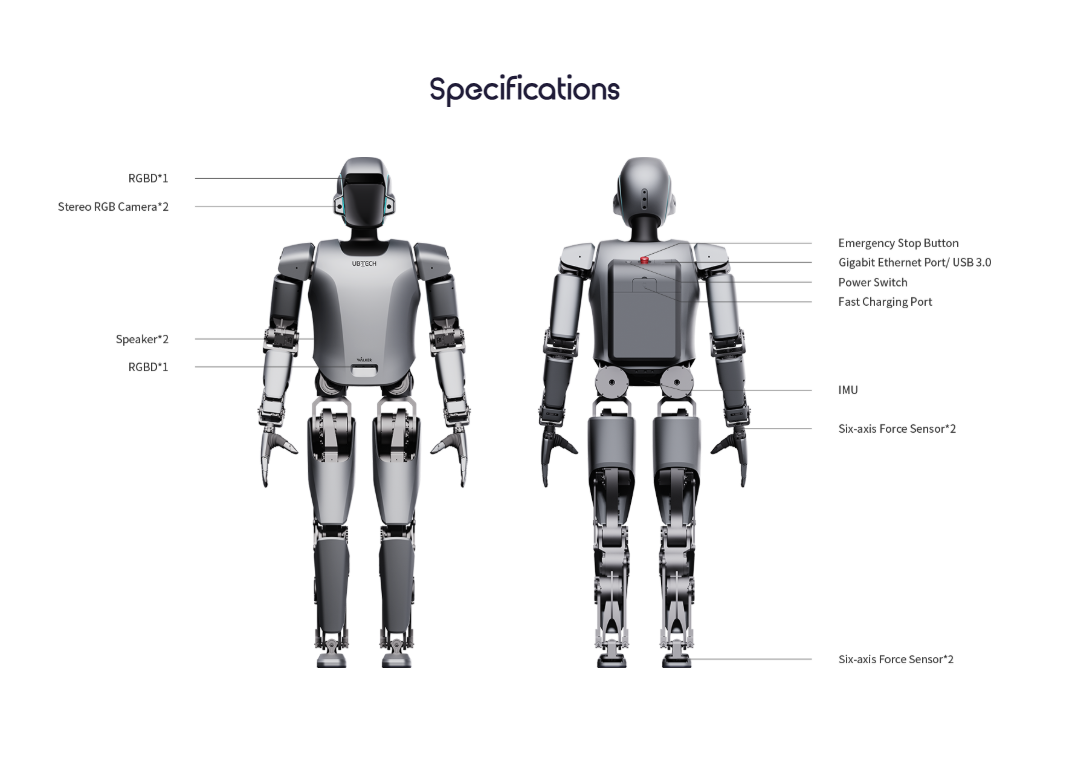
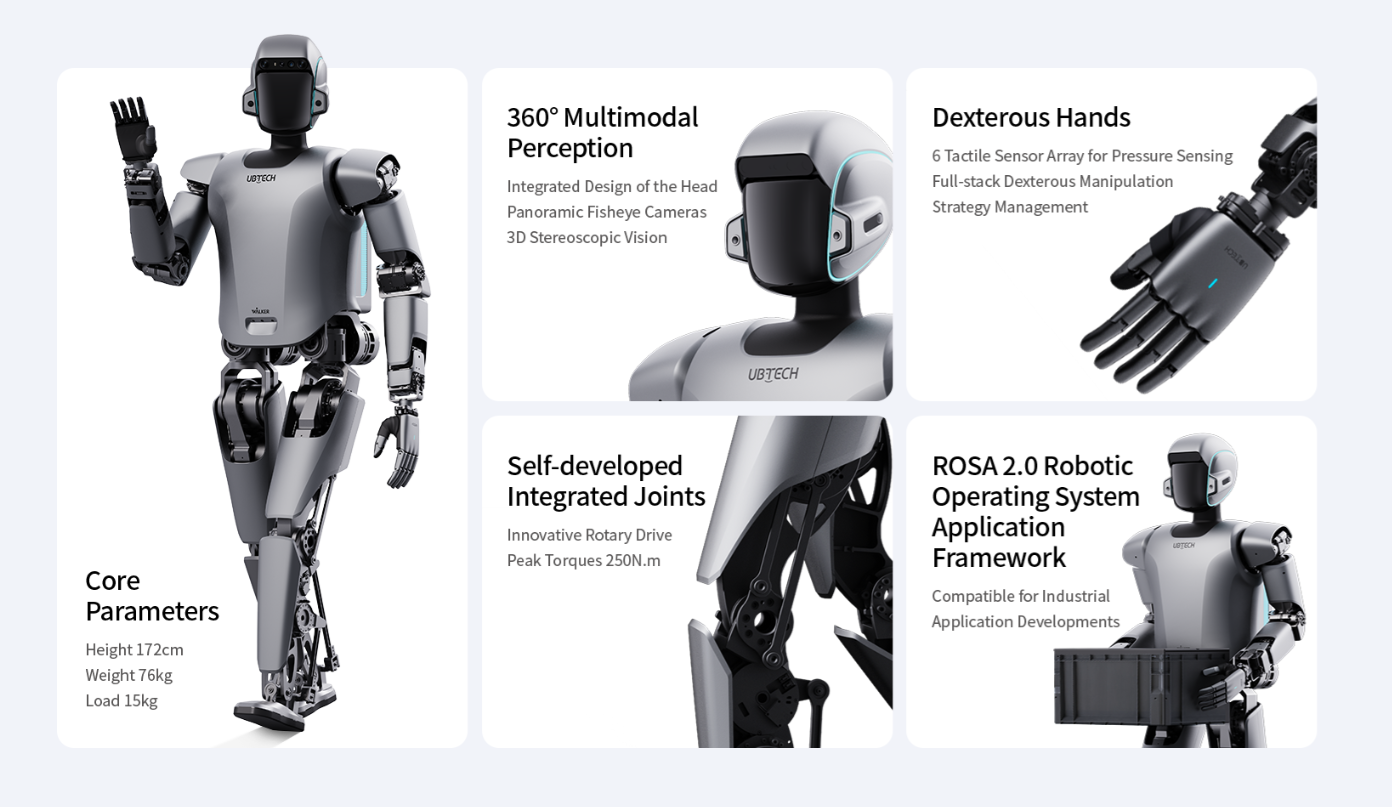
Spécifications techniques