 OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Anthropique - Claude
Anthropique - Claude xAI - Grok
xAI - Grok Recherche profonde
Recherche profonde Alibaba - Qwen
Alibaba - Qwen ByteDance - Le meilleur de ByteDance
ByteDance - Le meilleur de ByteDance Tous les modèles
Tous les modèles Plans d'entreprise
Plans d'entreprise Développement d'applications d'IA
Développement d'applications d'IA API de traduction IA
API de traduction IA Service SEO/GEO IA
Service SEO/GEO IA Service de relations publiques géo-optimisé
Service de relations publiques géo-optimisé Service de web scraping
Service de web scraping OpenClaw
OpenClaw Meilleurs outils d'IA
Meilleurs outils d'IA Les meilleurs robots IA
Les meilleurs robots IA
 Se connecter
Se connecter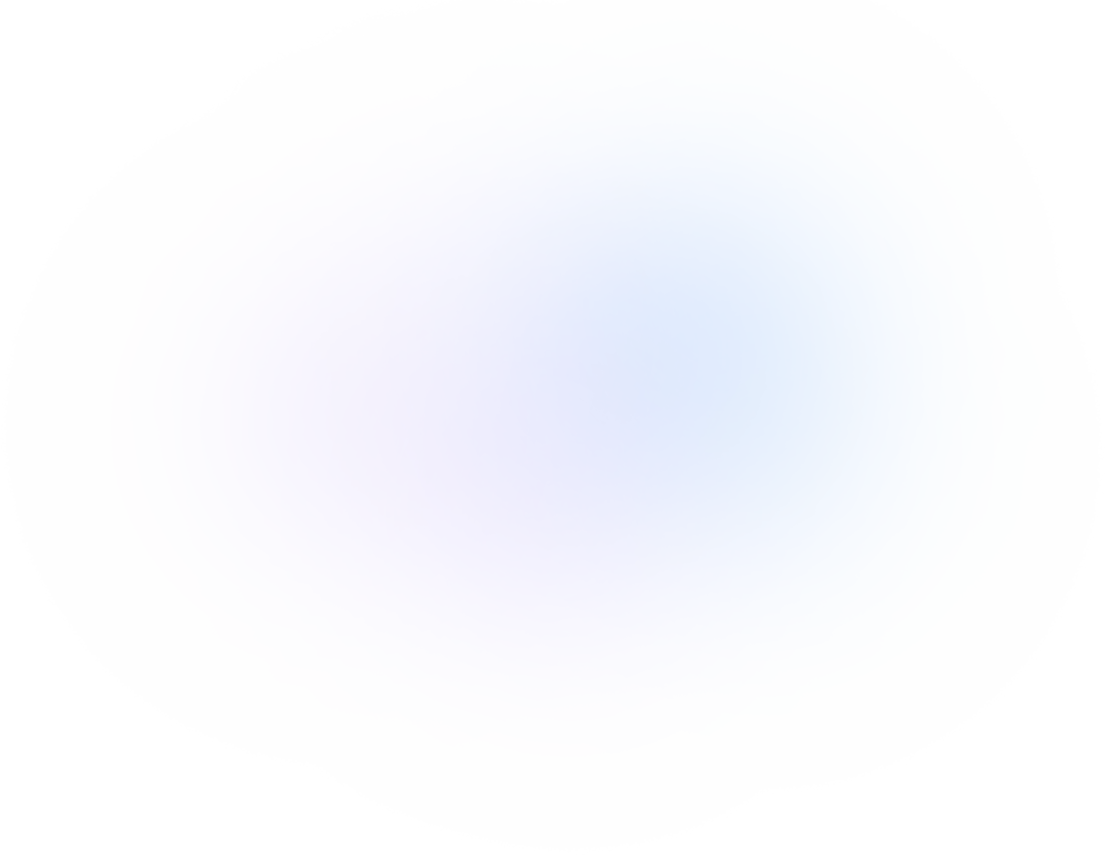



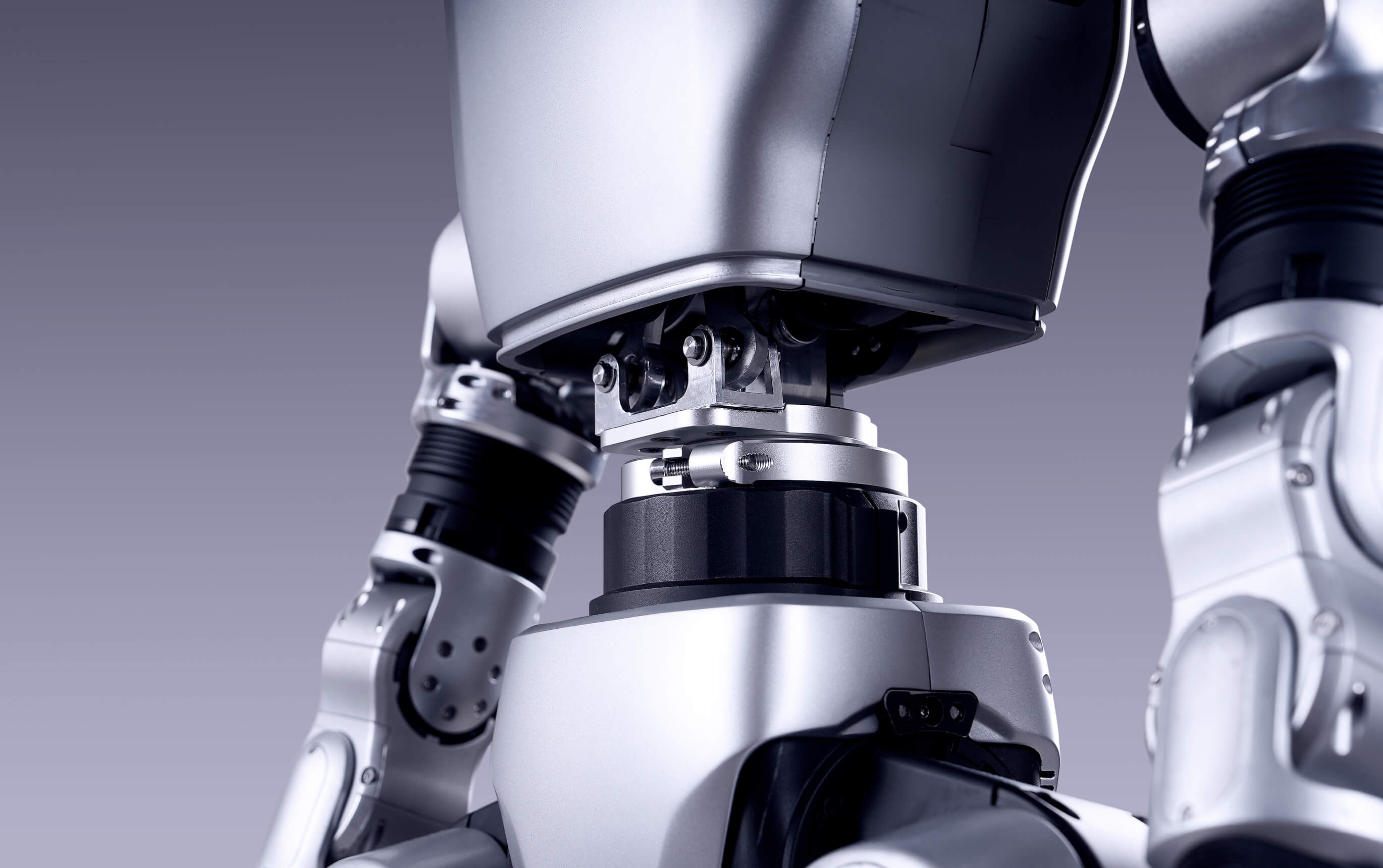



Description
Le Unitree G1 est compact et très flexible avatar d'IA d'agent humanoïde Robot doté d'une agilité extraordinaire, surpassant les capacités humaines. Il offre une très grande amplitude de mouvement articulaire (23 à 43 moteurs), un contrôle hybride force-position pour une manipulation précise et fiable, un apprentissage par imitation et renforcement piloté par l'IA, et le modèle du monde robotique UnifoLM. Il bénéficie de mises à jour OTA continues et évolue quotidiennement grâce à l'accélération par l'IA. Idéal pour la recherche, l'éducation, le développement et les tâches légères.
Caractéristiques techniques clés
| Paramètre | G1 (Standard/Base) | G1 EDU (Version avancée/éducation) |
|---|---|---|
| Hauteur × Largeur × Épaisseur (debout) | 1320 × 450 × 200 mm | 1320 × 450 × 200 mm |
| Dimensions pliées | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Poids (avec batterie) | ≈ 35 kg | ≈ 35 kg+ (selon la configuration) |
| Degrés de liberté totaux (DOF) | 23 | 23–43 (hautement configurable) |
| Degré de liberté à une jambe | 6 | 6 |
| Degré de liberté au niveau de la taille | 1 | 1 + 2 supplémentaires en option |
| DoF à un seul bras | 5 | 5 |
| DoF à une main | Basique | Jusqu'à 7 (main Dex3-1 à trois doigts contrôlée par la force : pouce 3 degrés de liberté actifs, index et majeur 2 chacun) + 2 degrés de liberté de poignet en option ; capteurs tactiles en option |
| Couple maximal au genou | 90 N·m | Jusqu'à 120 N·m |
| Charge utile maximale Arm | ≈ 2 kg | ≈ 3 kg (variable selon la position) |
| Longueur de jambe (mollet + cuisse) | 0,6 m | 0,6 m |
| Envergure des bras | ≈ 0,45 m | ≈ 0,45 m |
| Exemples d'amplitude de mouvement articulaire | Tour de taille Z ±155° Genou 0°–165° Hanche P ±154°, R -30° à +170°, Y ±158° | Même base + supplémentaire (par exemple, taille X±45°, Y±30° ; poignet P±92,5°, Y±92,5°) |
| Type d'articulation | Roulements à rouleaux croisés industriels + moteurs PMSM haute vitesse à faible inertie | Même |
| Puissance de calcul | Processeur haute performance à 8 cœurs | Processeur 8 cœurs + NVIDIA Jetson Orin (puissance de calcul IA élevée, jusqu'à 100–157 TOPS dans certaines configurations) |
| Capteurs | Caméra de profondeur + réseau LiDAR 3D à 4 microphones | Identique + matrices tactiles avancées en option |
| Audio | Haut-parleur 5W | Haut-parleur 5W |
| Connectivité | Wi-Fi 6 + Bluetooth 5.2 | Wi-Fi 6 + Bluetooth 5.2 |
| Batterie | Batterie lithium à dégagement rapide 9000 mAh (13S) | Même |
| Autonomie de la batterie | ≈ 2 heures | ≈ 2 heures |
| Chargeur | 54 V 5 A | 54 V 5 A |
| Refroidissement | Refroidissement local par air | Refroidissement local par air |
| Autres fonctionnalités | Mises à jour OTA continues Contrôleur manuel | Même support + prise en charge complète du développement secondaire (C/C++/Python, SDK, API) |
| Garantie | 8 mois | 18 mois |
| Utilisation ciblée | Général / niveau débutant | Recherche, éducation, IA avancée et développement |
Note: Les spécifications peuvent varier légèrement selon la configuration exacte et les mises à jour (notamment pour les versions éducatives). Le robot est pliable, puissant et compact, mais les utilisateurs doivent maintenir une distance de sécurité en raison de ses moteurs puissants et de sa structure complexe.