OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Антропический - Клод
Антропический - Клод xAI - Grok
xAI - Grok Глубокий поиск
Глубокий поиск Alibaba - Qwen
Alibaba - Qwen ByteDance - Лучшее от ByteDance
ByteDance - Лучшее от ByteDance Все модели
Все модели Планы предприятия
Планы предприятия Разработка приложений на основе искусственного интеллекта
Разработка приложений на основе искусственного интеллекта API для перевода с помощью ИИ
API для перевода с помощью ИИ Услуги SEO/ГЕ с использованием ИИ
Услуги SEO/ГЕ с использованием ИИ Географически оптимизированная PR-служба
Географически оптимизированная PR-служба Сервис веб-скрейпинга
Сервис веб-скрейпинга OpenClaw
OpenClaw Лучшие инструменты ИИ
Лучшие инструменты ИИ Лучшие роботы с искусственным интеллектом
Лучшие роботы с искусственным интеллектом
 Авторизоваться
Авторизоваться


Основные технологии искусственного интеллекта
Большая языковая модель для
Общее планирование задач
Благодаря использованию передовой технологии планирования для решения общих задач, Walker S1 получает возможность в Понимание намерений и планирование задачИнновационные применения и сложность внедрения этих технологий ставят их в один ряд с лучшими образцами в мировой индустрии.
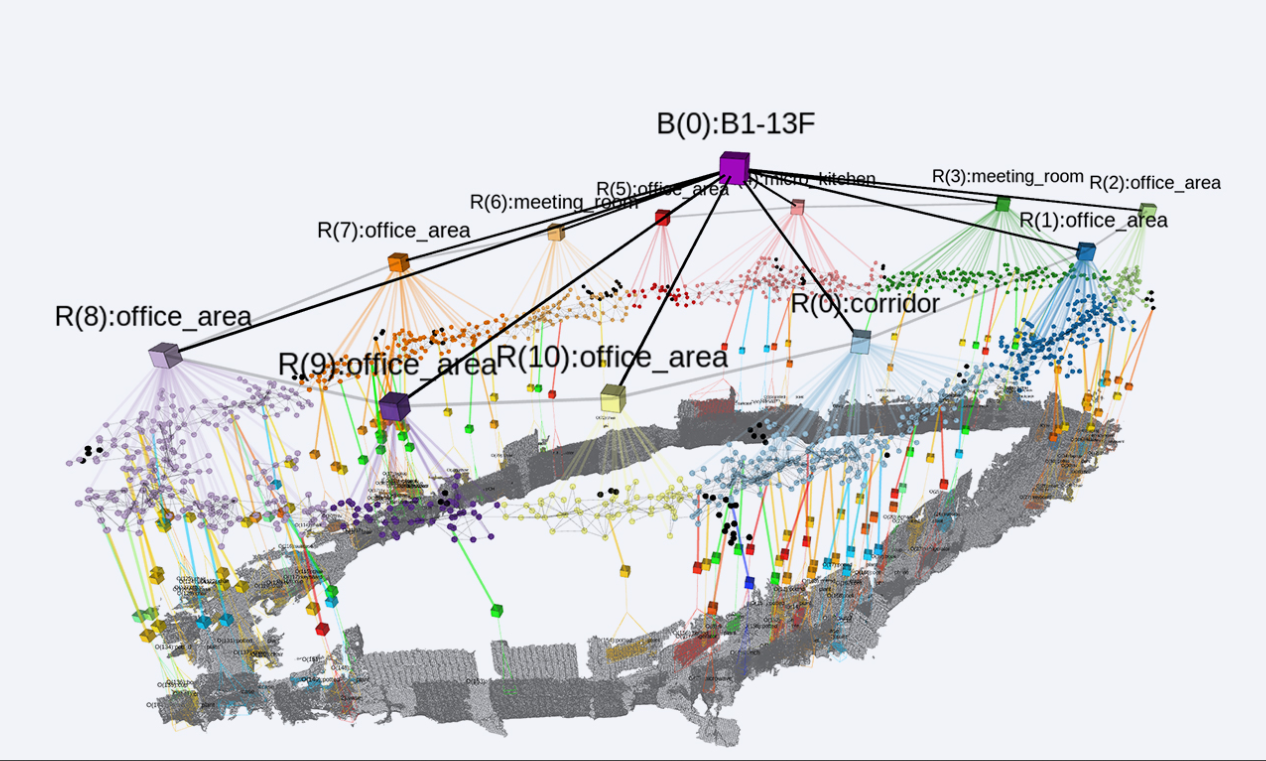
Семантическая VSLAM-навигация
Разработав тесно связанный метод семантического восприятия информации и традиционной VSLAM, двухэтапная семантическая навигация Улучшает способность к пространственному восприятию у модели Walker S1 и отвечает потребностям в обобщении в промышленных условиях.
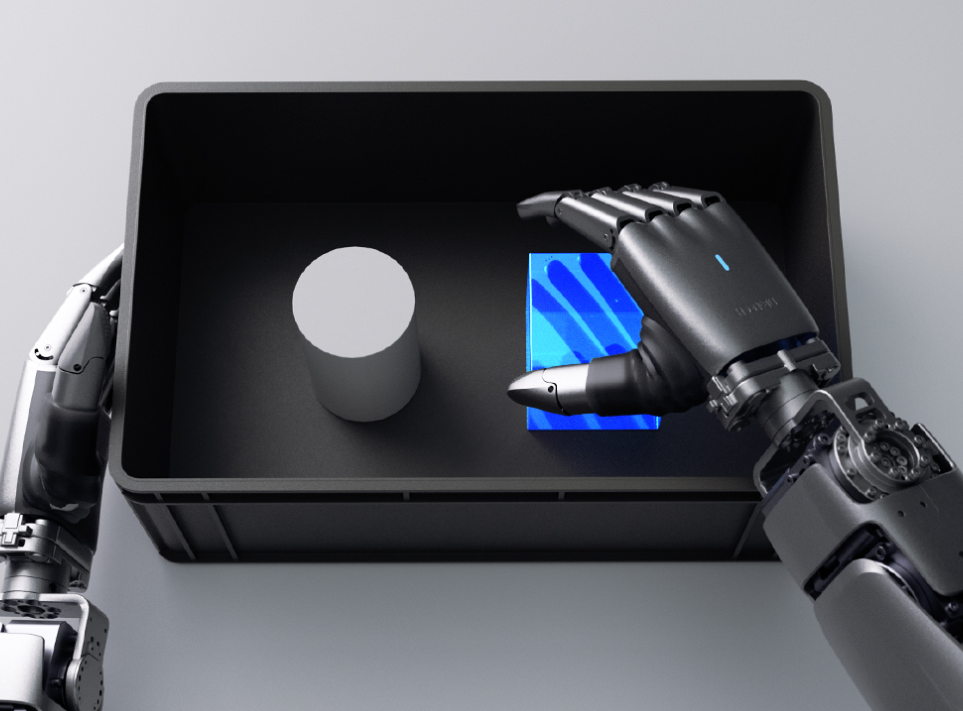
Обучение, основанное на принципах целостного подхода к организму
Управление движением
Интегрированная система восприятия и управления, основанная на сквозном обучении и управлении движениями всего тела, позволяет Walker S1 достичь следующих результатов: ловкость рук и умение уверенно ходить.расширяя свои возможности по выполнению сложных неструктурированных задач в обобщенном виде.
Решение ключевых промышленных задач
Робот Walker S1 решает три критических проблемы, возникающих при применении человекоподобных роботов.

Визуальное позиционирование
Преодоление трудностей, возникающих при переменном освещении и сложных условиях окружающей среды.
Динамическое движение
Решение проблем алгоритмов управления движением в условиях динамических высоких нагрузок.
Охлаждение соединения
Решение проблем с охлаждением соединений при длительной эксплуатации в условиях высоких нагрузок.
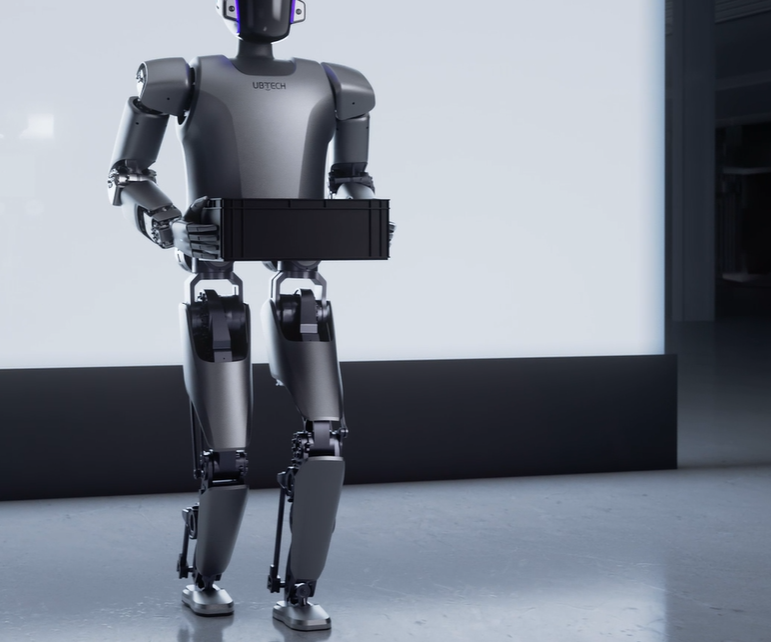
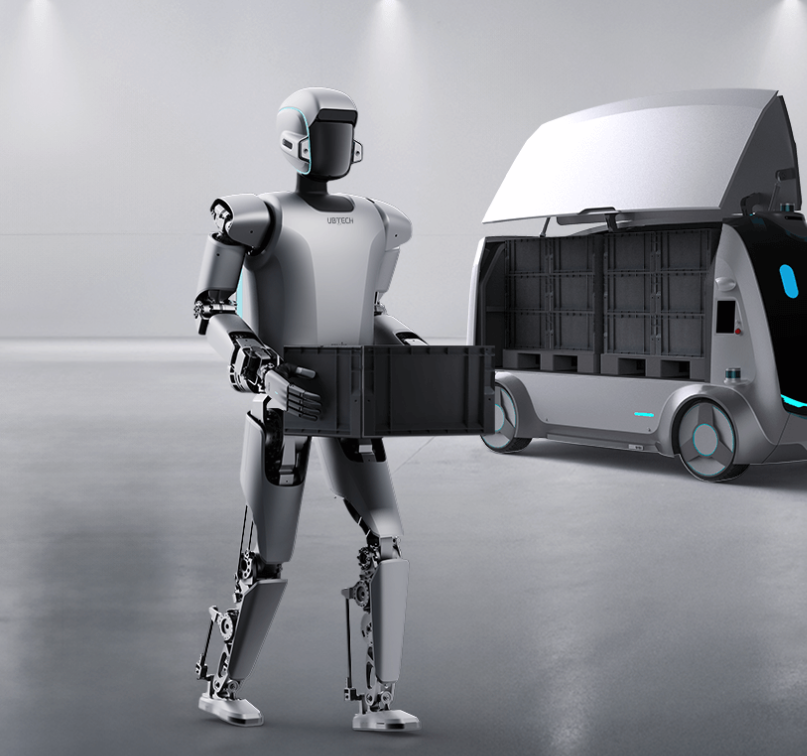
человекоподобный робот
Прикладное решение
Система Walker S1 внедрена на сборочные линии автомобильного производства для оказания помощи в выпуске автомобилей, работая в сотрудничестве с автономными логистическими транспортными средствами и AMR/AGV посредством интеллектуальных систем управления производством.

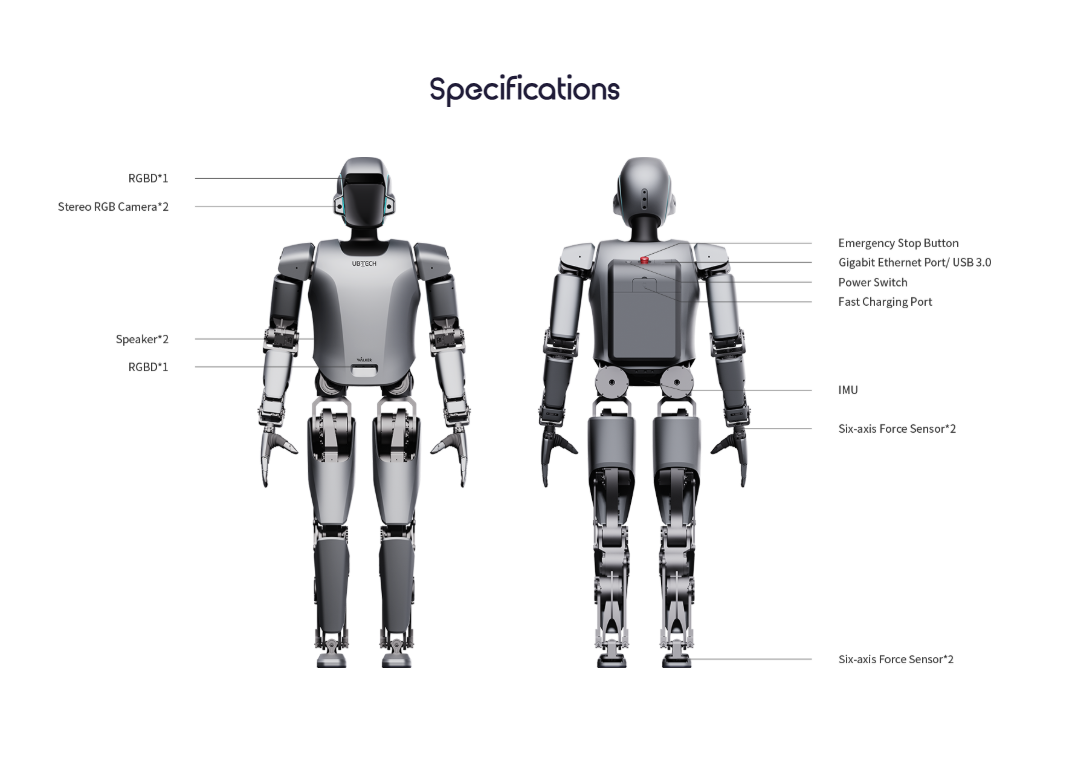
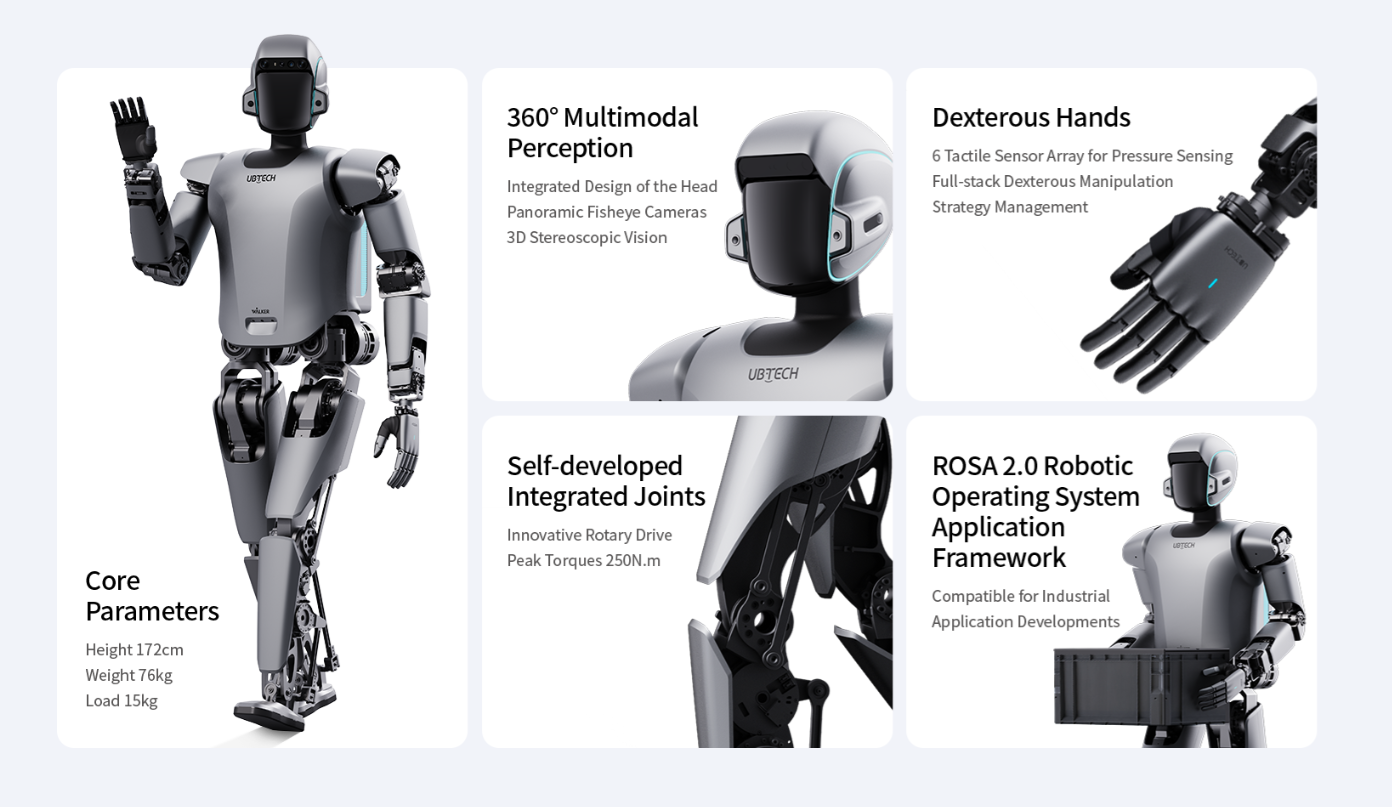
Технические характеристики