 OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Антропический - Клод
Антропический - Клод xAI - Grok
xAI - Grok Глубокий поиск
Глубокий поиск Alibaba - Qwen
Alibaba - Qwen ByteDance - Лучшее от ByteDance
ByteDance - Лучшее от ByteDance Все модели
Все модели Планы предприятия
Планы предприятия Разработка приложений на основе искусственного интеллекта
Разработка приложений на основе искусственного интеллекта API для перевода с помощью ИИ
API для перевода с помощью ИИ Услуги SEO/ГЕ с использованием ИИ
Услуги SEO/ГЕ с использованием ИИ Географически оптимизированная PR-служба
Географически оптимизированная PR-служба Сервис веб-скрейпинга
Сервис веб-скрейпинга OpenClaw
OpenClaw Лучшие инструменты ИИ
Лучшие инструменты ИИ Лучшие роботы с искусственным интеллектом
Лучшие роботы с искусственным интеллектом
 Авторизоваться
Авторизоваться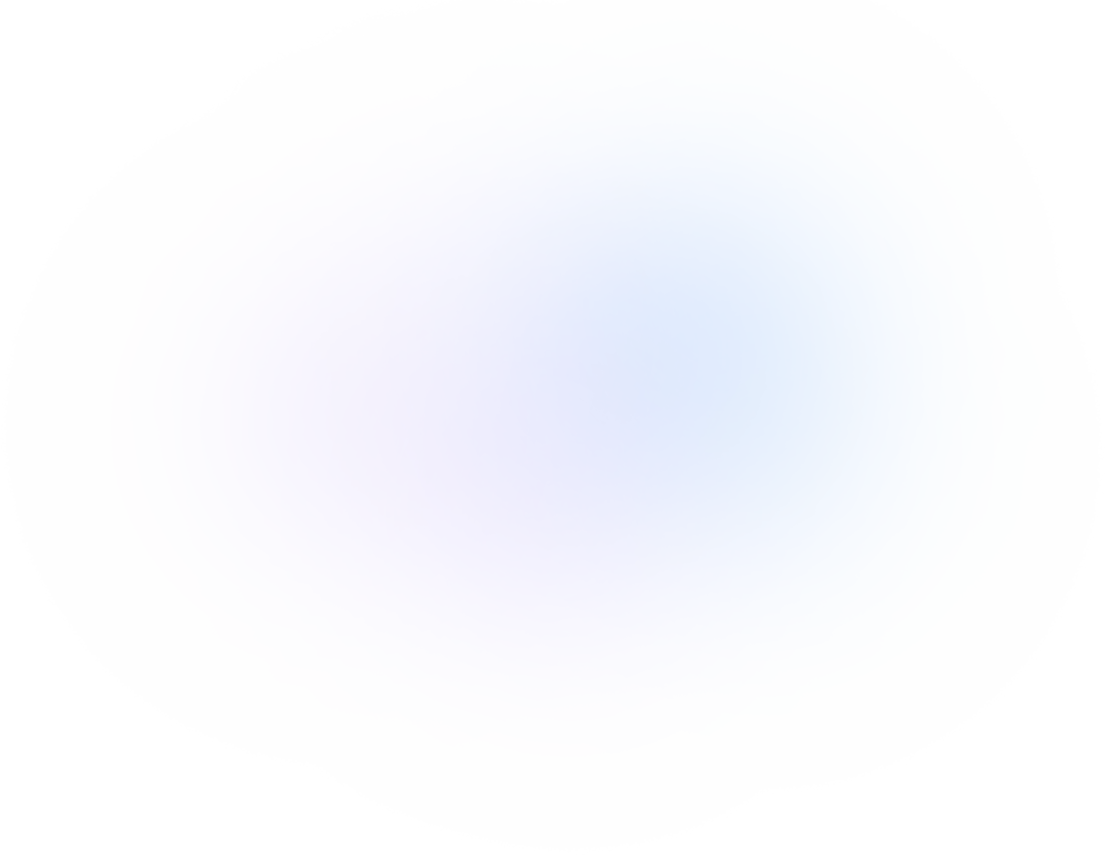






Описание
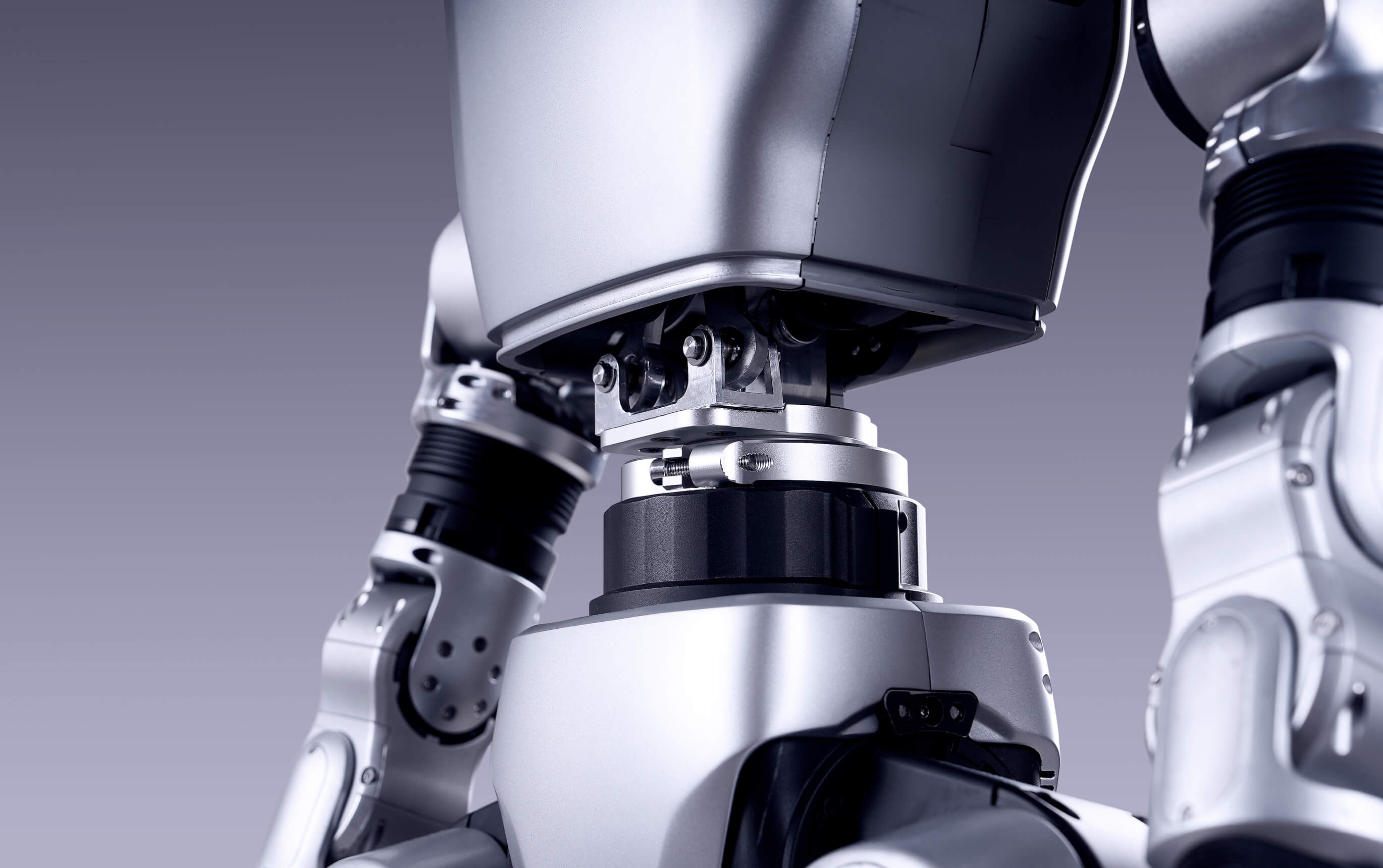
Он Unitree G1 компактный, очень гибкий человекоподобный агент ИИ аватар Робот обладает исключительной маневренностью, превосходящей возможности обычного человека. Он отличается сверхбольшим диапазоном движения суставов (23–43 двигателя в суставах), гибридным управлением силой и положением для точной и надежной ловкости манипуляций, имитационным и подкрепляющим обучением на основе ИИ, а также моделью мира робота UnifoLM. Он поддерживает непрерывные обновления OTA и ежедневно развивается благодаря ускорению ИИ. Идеально подходит для исследований, образования, разработок и несложных задач.
Основные технические характеристики
| Параметр | G1 (Стандартный/Базовый) | G1 EDU (Расширенная/Образовательная версия) |
|---|---|---|
| Высота × Ширина × Толщина (в вертикальном положении) | 1320 × 450 × 200 мм | 1320 × 450 × 200 мм |
| Размеры в сложенном виде | 690 × 450 × 300 мм | 690 × 450 × 300 мм |
| Вес (с батареей) | ≈ 35 кг | ≈ 35 кг+ (в зависимости от конфигурации) |
| Полное число степеней свободы (DOF) | 23 | 23–43 (широко настраиваемый) |
| Степень свободы одной ноги | 6 | 6 |
| Глубина свободы талии | 1 | 1 + дополнительная опция 2 |
| Одноплечевой DOF | 5 | 5 |
| Глубина резкости при работе одной рукой | Базовый | До 7 степеней свободы (управляемая силой трехпальцевая кисть Dex3-1: большой палец — 3 активные степени свободы, указательный и средний — по 2) + опционально 2 степени свободы на запястье; тактильные датчики опционально. |
| Максимальный крутящий момент колена | 90 Н·м | До 120 Н·м |
| Максимальная полезная нагрузка Arm | ≈ 2 кг | ≈ 3 кг (варьируется в зависимости от позы) |
| Длина ноги (икра + бедро) | 0,6 м | 0,6 м |
| Размах рук | ≈ 0,45 м | ≈ 0,45 м |
| Примеры диапазона движений в суставах | Талия Z±155° Колено 0°–165° Бедро P±154°, R-30°~+170°, Y±158° | Та же основа + дополнительные параметры (например, талия X±45°, Y±30°; запястье P±92,5°, Y±92,5°) |
| Тип соединения | Промышленные перекрестные роликовые подшипники + низкоинерционные высокоскоростные синхронные двигатели с постоянными магнитами | Такой же |
| Вычислительная мощность | 8-ядерный высокопроизводительный процессор | 8-ядерный процессор + NVIDIA Jetson Orin (высокопроизводительные вычисления для ИИ, до 100–157 TOPS в некоторых конфигурациях) |
| Датчики | Камера глубины + 3D LiDAR, массив из 4 микрофонов | Аналогичные + опциональные расширенные тактильные массивы |
| Аудио | 5-ваттный динамик | 5-ваттный динамик |
| Подключение | Wi-Fi 6 + Bluetooth 5.2 | Wi-Fi 6 + Bluetooth 5.2 |
| Батарея | Литиевая батарея быстрого высвобождения 9000 мАч (13S) | Такой же |
| Время работы от батареи | ≈ 2 часа | ≈ 2 часа |
| Зарядное устройство | 54 В 5 А | 54 В 5 А |
| Охлаждение | Локальное воздушное охлаждение | Локальное воздушное охлаждение |
| Другие функции | Непрерывные обновления по воздуху (OTA) Ручной контроллер | Та же поддержка + полная поддержка вторичной разработки (C/C++/Python, SDK, API) |
| Гарантия | 8 месяцев | 18 месяцев |
| Целевое использование | Общие / начального уровня | Исследования, образование, передовой искусственный интеллект и разработки. |
Примечание: Технические характеристики могут незначительно отличаться в зависимости от конкретной конфигурации и обновлений (особенно для образовательных версий). Робот складной, мощный и компактный, но пользователям следует соблюдать безопасное расстояние из-за его мощных двигателей и сложной конструкции.