OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Antrópico - Claude
Antrópico - Claude xAI - Grok
xAI - Grok Búsqueda profunda
Búsqueda profunda Alibaba - Reina
Alibaba - Reina ByteDance - Lo mejor de ByteDance
ByteDance - Lo mejor de ByteDance Todos los modelos
Todos los modelos Planes empresariales
Planes empresariales Desarrollo de aplicaciones de IA
Desarrollo de aplicaciones de IA API de traducción de IA
API de traducción de IA Servicio de SEO/GEO con IA
Servicio de SEO/GEO con IA Servicio de relaciones públicas geooptimizado
Servicio de relaciones públicas geooptimizado Servicio de extracción de datos web
Servicio de extracción de datos web OpenClaw
OpenClaw Las mejores herramientas de IA
Las mejores herramientas de IA Los mejores robots de IA
Los mejores robots de IA
 Acceso
Acceso


Tecnologías básicas de IA
Modelo de lenguaje grande para
Planificación general de tareas
Al utilizar la tecnología del modelo de planificación avanzada para tareas generales, Walker S1 adquiere la capacidad de comprensión de intenciones y planificación de tareasLas aplicaciones innovadoras y la complejidad de la implementación de estas tecnologías se encuentran entre las mejores del sector a nivel mundial.
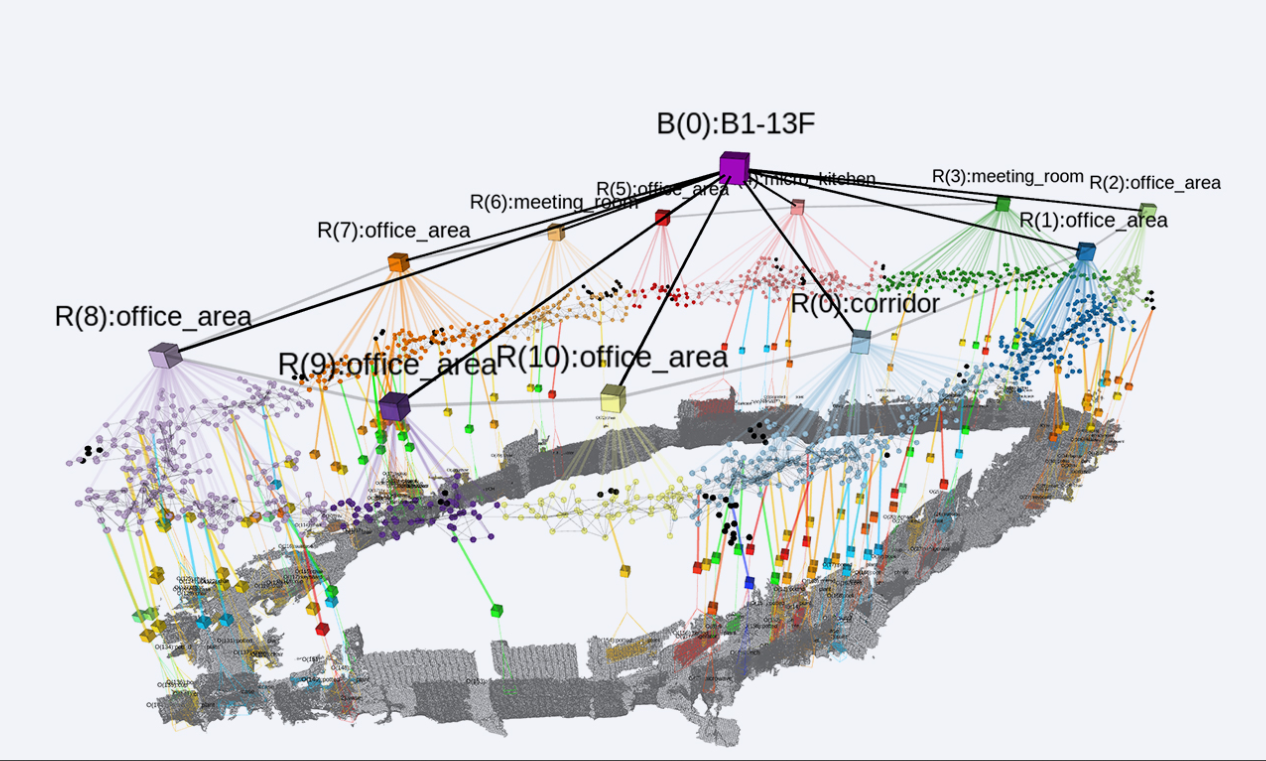
Navegación VSLAM semántica
Al diseñar un método estrechamente acoplado de información de percepción semántica y VSLAM tradicional, se obtiene un navegación semántica en dos etapas Mejora la capacidad de comprensión espacial de Walker S1 y satisface las necesidades de generalización en escenarios industriales.
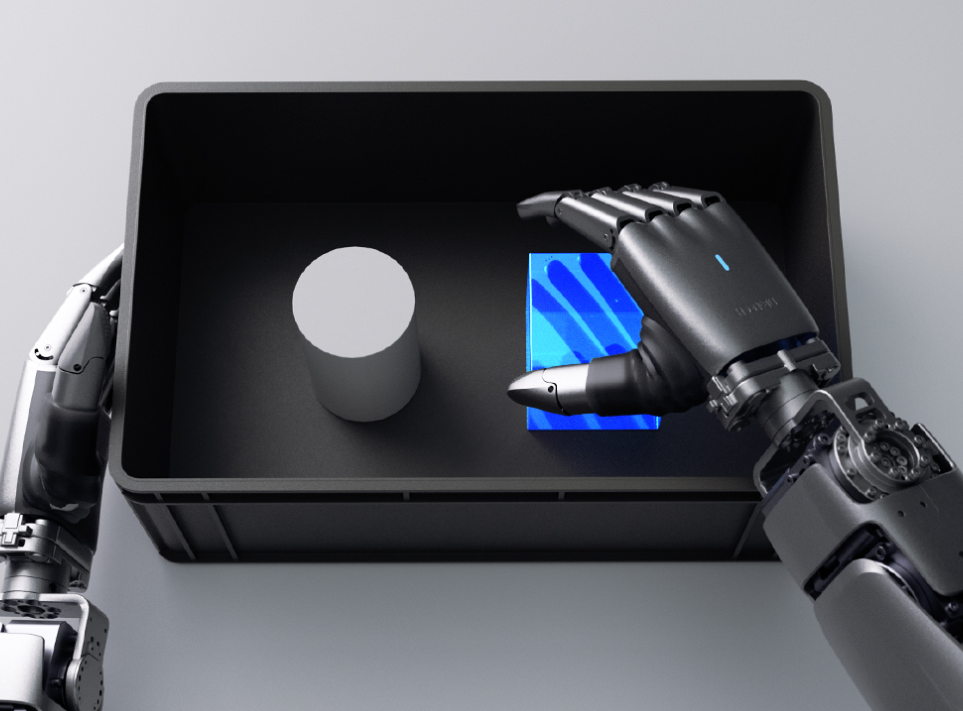
Aprendizaje integral basado en el cuerpo
Control de movimiento
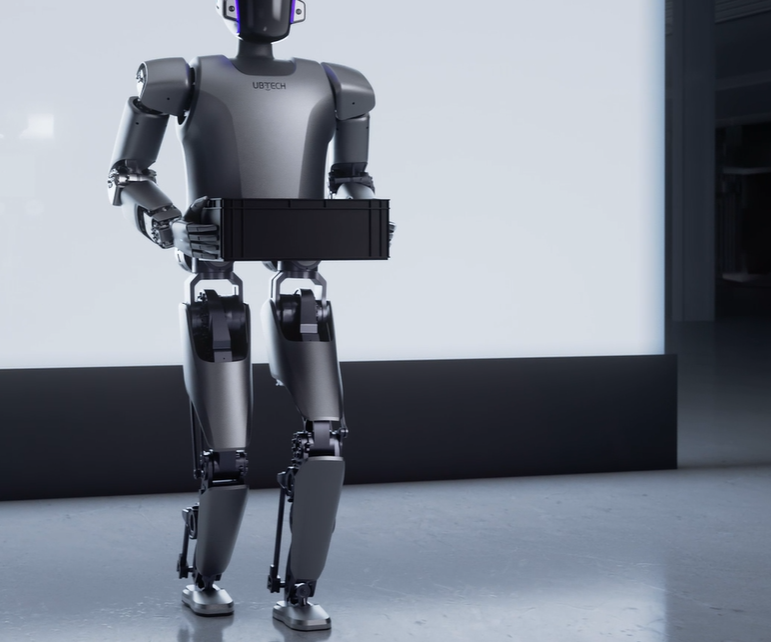
El marco de control de movimiento de todo el cuerpo basado en aprendizaje de extremo a extremo, integrado en percepción y control, permite a Walker S1 lograr Habilidades de manipulación diestras y capacidad para caminar con estabilidad, mejorando sus capacidades de ejecución generalizadas para tareas complejas no estructuradas.
Solución de los principales desafíos industriales
El Walker S1 aborda tres cuellos de botella críticos en la aplicación de robots humanoides.

Posicionamiento visual
Superar problemas que surgen bajo condiciones de iluminación variables y entornos complejos.
Movimiento dinámico
Resolución de problemas de algoritmos de control de movimiento en condiciones dinámicas de alta carga.
Refrigeración conjunta
Solución de problemas de refrigeración conjunta durante el funcionamiento a largo plazo bajo cargas elevadas.
Robot humanoide
Solución de aplicación
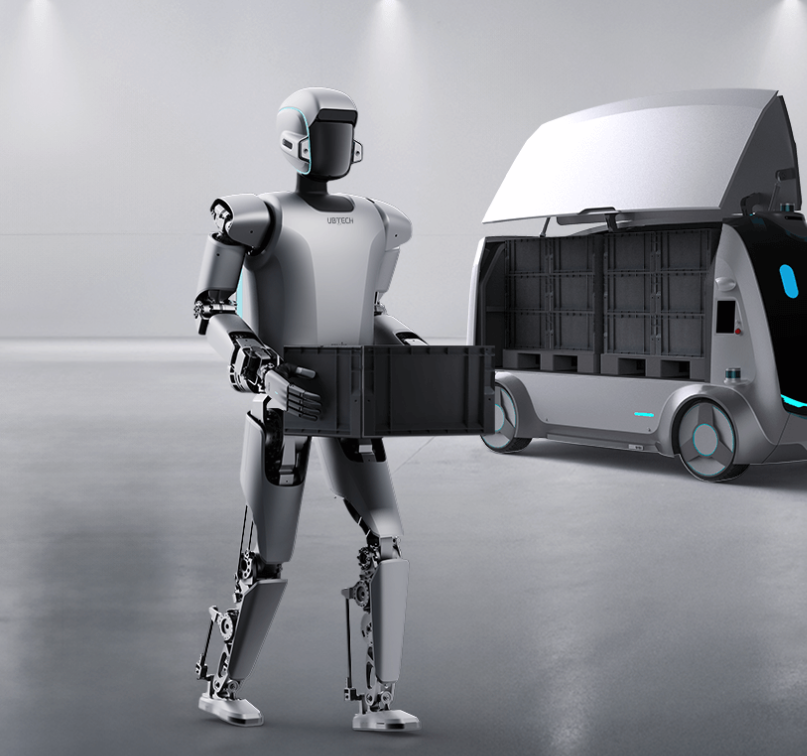
El sistema Walker S1 se ha incorporado a las líneas de montaje de la fabricación de vehículos para ayudar en la producción de automóviles, trabajando en colaboración con vehículos logísticos autónomos y AMR/AGV a través de sistemas inteligentes de gestión de la fabricación.

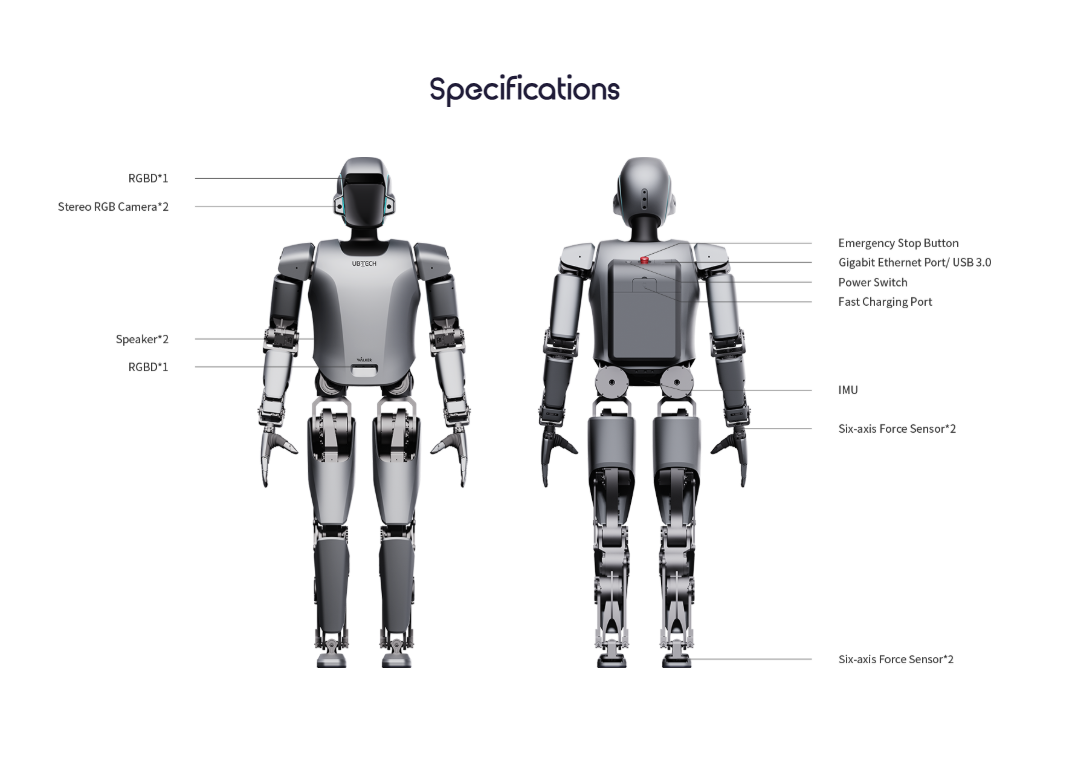
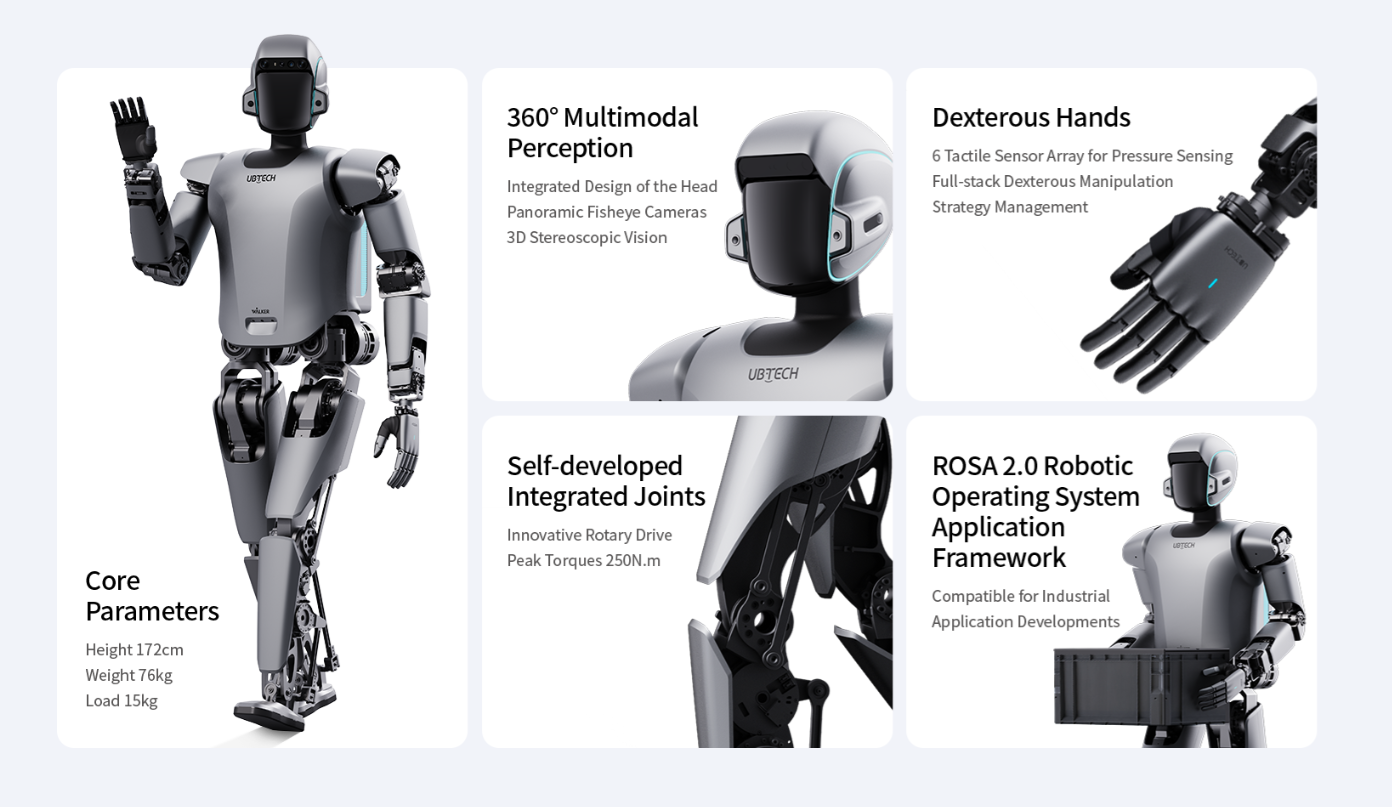
Especificaciones técnicas