 OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Antrópico - Claude
Antrópico - Claude xAI - Grok
xAI - Grok Búsqueda profunda
Búsqueda profunda Alibaba - Reina
Alibaba - Reina ByteDance - Lo mejor de ByteDance
ByteDance - Lo mejor de ByteDance Todos los modelos
Todos los modelos Planes empresariales
Planes empresariales Desarrollo de aplicaciones de IA
Desarrollo de aplicaciones de IA API de traducción de IA
API de traducción de IA Servicio de SEO/GEO con IA
Servicio de SEO/GEO con IA Servicio de relaciones públicas geooptimizado
Servicio de relaciones públicas geooptimizado Servicio de extracción de datos web
Servicio de extracción de datos web OpenClaw
OpenClaw Las mejores herramientas de IA
Las mejores herramientas de IA Los mejores robots de IA
Los mejores robots de IA
 Acceso
Acceso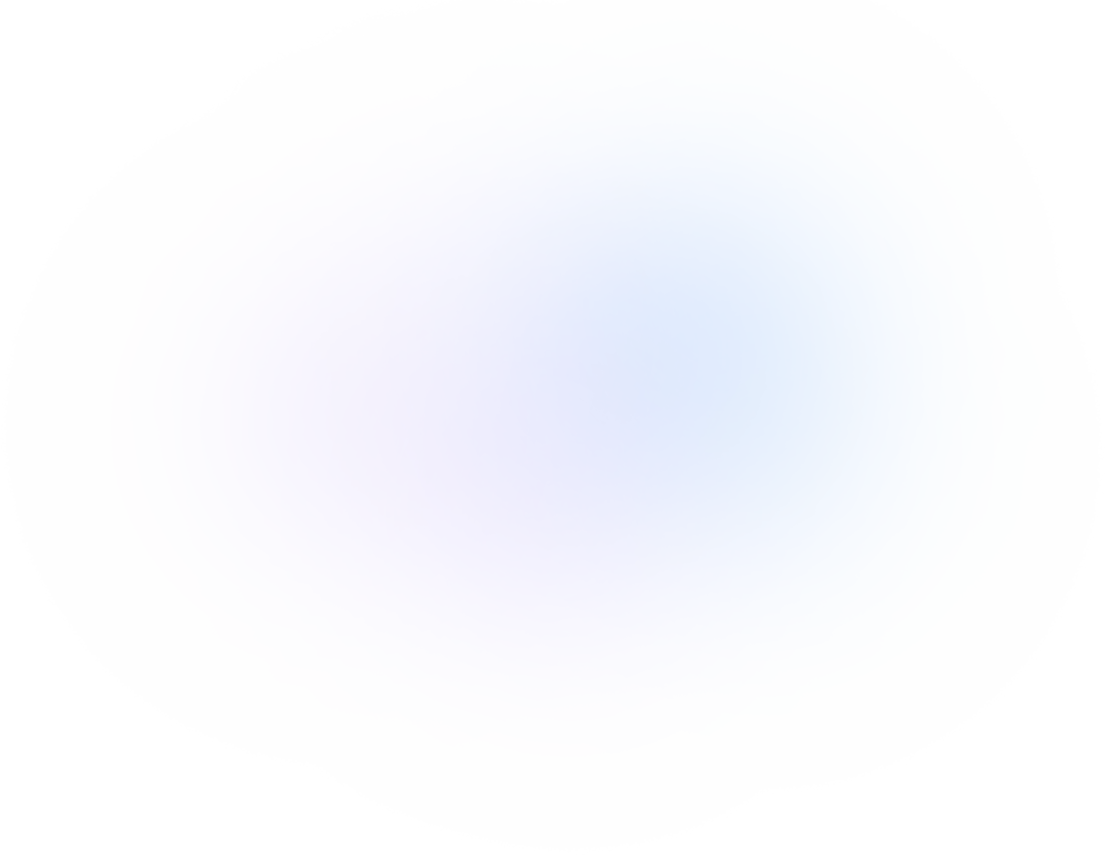






Descripción
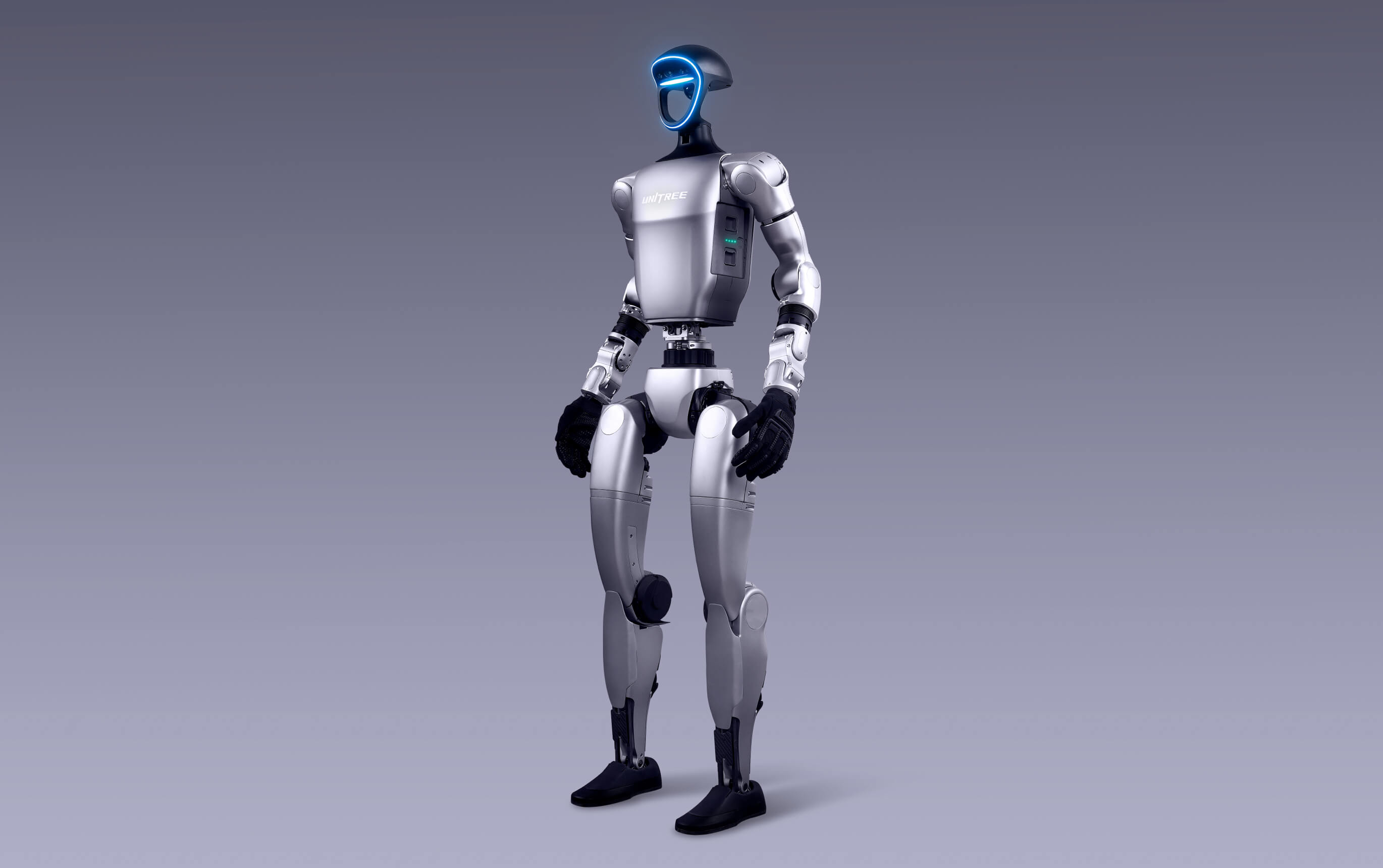
El Unitree G1 Es un dispositivo compacto y muy flexible. Avatar humanoide de IA Robot con una agilidad extraordinaria que supera las capacidades humanas. Ofrece un amplio rango de movimiento articular (23-43 motores), control híbrido de fuerza y posición para una manipulación precisa y fiable, aprendizaje por imitación y refuerzo basado en IA, y el modelo del mundo robótico UnifoLM. Admite actualizaciones inalámbricas continuas (OTA) y evoluciona diariamente mediante aceleración por IA. Ideal para investigación, educación, desarrollo y tareas sencillas.
Especificaciones técnicas clave
| Parámetro | G1 (Estándar/Básico) | G1 EDU (Versión avanzada/educativa) |
|---|---|---|
| Altura × Ancho × Grosor (De pie) | 1320 × 450 × 200 mm | 1320 × 450 × 200 mm |
| Dimensiones plegadas | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Peso (con batería) | ≈ 35 kg | ≈ 35 kg+ (dependiendo de la configuración) |
| Grados de libertad totales (GDL) | 23 | 23–43 (altamente configurable) |
| Grados de libertad de una sola pierna | 6 | 6 |
| Cintura DOF | 1 | 1 + extra opcional 2 |
| Grados de libertad de un solo brazo | 5 | 5 |
| Profundidad de campo de una sola mano | Básico | Hasta 7 (mano de control de fuerza de tres dedos Dex3-1: pulgar con 3 grados de libertad activos, índice y medio con 2 cada uno) + 2 grados de libertad de muñeca opcionales; sensores táctiles opcionales |
| Par máximo de torsión de la rodilla | 90 N·m | Hasta 120 N·m |
| Carga útil máxima del brazo | ≈ 2 kg | ≈ 3 kg (varía según la postura) |
| Largo de pierna (pantorrilla + muslo) | 0,6 m | 0,6 m |
| Envergadura de los brazos | ≈ 0,45 m | ≈ 0,45 m |
| Ejemplos de rango de movimiento articular | Cintura Z±155° Rodilla 0°–165° Cadera P±154°, R-30°~+170°, Y±158° | Misma base + extra (por ejemplo, cintura X±45°, Y±30°; muñeca P±92,5°, Y±92,5°) |
| Tipo de articulación | Rodamientos industriales de rodillos cruzados + motores PMSM de alta velocidad y baja inercia | Mismo |
| Potencia de cálculo | CPU de alto rendimiento de 8 núcleos | CPU de 8 núcleos + NVIDIA Jetson Orin (alta capacidad de procesamiento para IA, hasta 100–157 TOPS en algunas configuraciones) |
| Sensores | Cámara de profundidad + matriz de 4 micrófonos LiDAR 3D | Igual + matrices táctiles avanzadas opcionales |
| Audio | Altavoz de 5 W | Altavoz de 5 W |
| Conectividad | WiFi 6 + Bluetooth 5.2 | WiFi 6 + Bluetooth 5.2 |
| Batería | Batería de litio de liberación rápida de 9000 mAh (13S) | Mismo |
| Duración de la batería | ≈ 2 horas | ≈ 2 horas |
| Cargador | 54V 5A | 54V 5A |
| Enfriamiento | Refrigeración local del aire | Refrigeración local del aire |
| Otras características | Actualizaciones OTA continuas Controlador manual | Igual + soporte completo para desarrollo secundario (C/C++/Python, SDK, API) |
| Garantía | 8 meses | 18 meses |
| Uso previsto | General / nivel básico | Investigación, educación, IA avanzada y desarrollo |
Nota: Las especificaciones pueden variar ligeramente según la configuración exacta y las actualizaciones (especialmente en las versiones educativas). El robot es plegable, potente y compacto, pero los usuarios deben mantener una distancia de seguridad debido a sus potentes motores y su compleja estructura.