 OpenAI - ChatGPT, Sora
OpenAI - ChatGPT, Sora Google - Gemini, Nano Banana
Google - Gemini, Nano Banana Antrópico - Claude
Antrópico - Claude xAI - Grok
xAI - Grok Busca profunda
Busca profunda Alibaba - Qwen
Alibaba - Qwen ByteDance - O Melhor da ByteDance
ByteDance - O Melhor da ByteDance Todos os modelos
Todos os modelos Planos Empresariais
Planos Empresariais Desenvolvimento de aplicações de IA
Desenvolvimento de aplicações de IA API de tradução de IA
API de tradução de IA Serviço de SEO/GEO com IA
Serviço de SEO/GEO com IA Serviço de Relações Públicas Otimizado por Geolocalização
Serviço de Relações Públicas Otimizado por Geolocalização Serviço de Web Scraping
Serviço de Web Scraping OpenClaw
OpenClaw Principais ferramentas de IA
Principais ferramentas de IA Os melhores robôs de IA
Os melhores robôs de IA
 Conecte-se
Conecte-se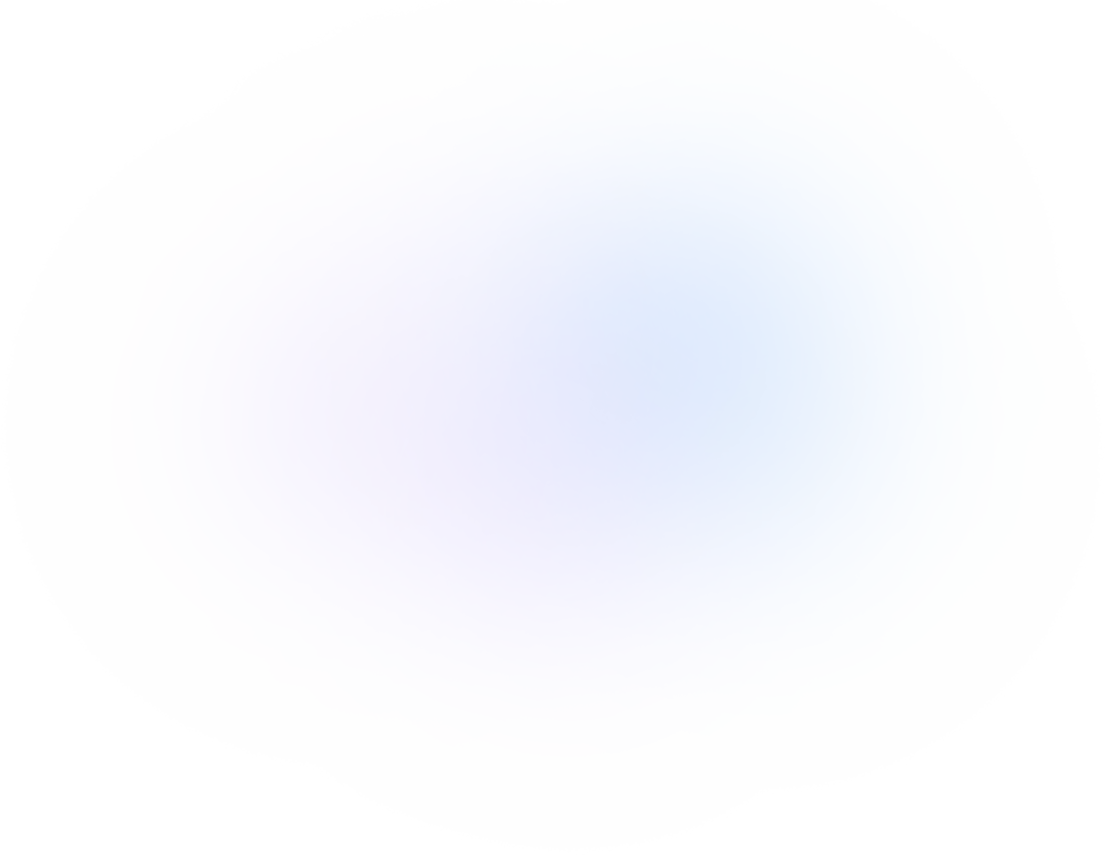






Descrição
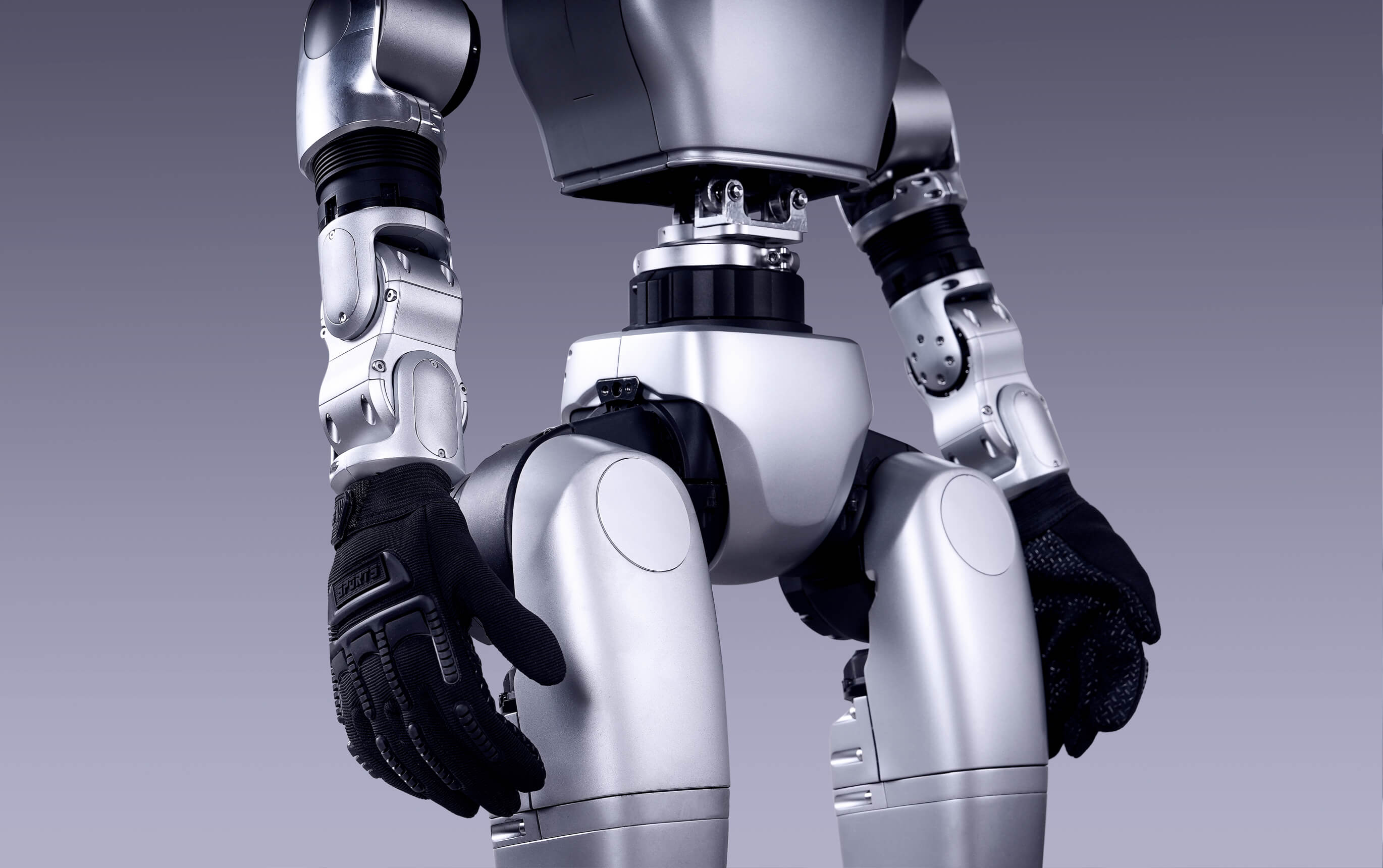
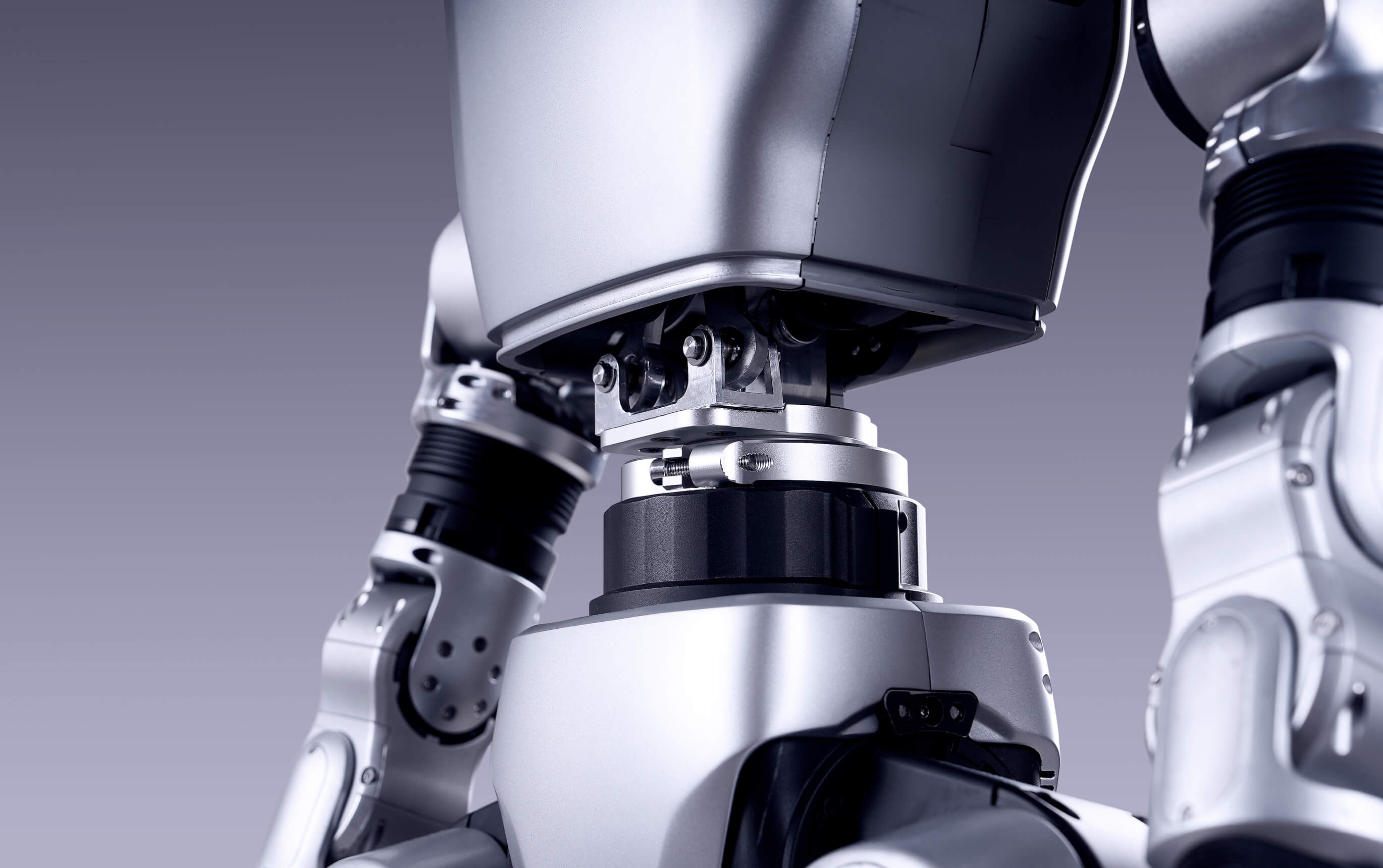
O Unitree G1 É compacto e altamente flexível. avatar de IA de agente humanoide Robô com agilidade extraordinária, superior às capacidades humanas normais. Possui ampla amplitude de movimento nas articulações (23 a 43 motores), controle híbrido de força e posição para manipulação precisa e confiável, aprendizado por imitação e reforço baseado em IA e o modelo de mundo robótico UnifoLM. Suporta atualizações OTA contínuas e evolui diariamente por meio da aceleração por IA. Ideal para pesquisa, educação, desenvolvimento e tarefas leves.
Principais especificações técnicas
| Parâmetro | G1 (Padrão/Base) | G1 EDU (Versão Avançada/Educacional) |
|---|---|---|
| Altura × Largura × Espessura (em pé) | 1320 × 450 × 200 mm | 1320 × 450 × 200 mm |
| Dimensões dobradas | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Peso (com bateria) | ≈ 35 kg | ≈ 35 kg+ (dependendo da configuração) |
| Total de graus de liberdade (DOF) | 23 | 23–43 (altamente configurável) |
| Perna única DOF | 6 | 6 |
| Profundidade de liberdade da cintura | 1 | 1 + 2 extras opcionais |
| Braço único DOF | 5 | 5 |
| Graus de liberdade com uma mão | Básico | Até 7 (mão de três dedos Dex3-1 com controle de força: polegar com 3 graus de liberdade ativos, indicador e médio com 2 cada) + 2 graus de liberdade opcionais no pulso; sensores táteis opcionais |
| Torque máximo do joelho | 90 N·m | Até 120 N·m |
| Carga útil máxima do braço | ≈ 2 kg | ≈ 3 kg (varia conforme a postura) |
| Comprimento da perna (panturrilha + coxa) | 0,6 m | 0,6 m |
| Envergadura dos braços | ≈ 0,45 m | ≈ 0,45 m |
| Exemplos de amplitude de movimento articular | Cintura Z±155° Joelho 0°–165° Quadril P±154°, R-30°~+170°, Y±158° | Mesma base + extras (ex: Cintura X±45°, Y±30°; Punho P±92,5°, Y±92,5°) |
| Tipo de junta | Rolamentos industriais de rolos cruzados + motores PMSM de alta velocidade e baixa inércia | Mesmo |
| Poder computacional | CPU de alto desempenho de 8 núcleos | CPU de 8 núcleos + NVIDIA Jetson Orin (alto poder computacional para IA, até 100–157 TOPS em algumas configurações) |
| Sensores | Câmera de profundidade + conjunto de 4 microfones LiDAR 3D | Idem + matrizes táteis avançadas opcionais |
| Áudio | Alto-falante de 5W | Alto-falante de 5W |
| Conectividade | Wi-Fi 6 + Bluetooth 5.2 | Wi-Fi 6 + Bluetooth 5.2 |
| Bateria | Bateria de lítio de liberação rápida de 9000mAh (13S) | Mesmo |
| Duração da bateria | aproximadamente 2 horas | aproximadamente 2 horas |
| Carregador | 54V 5A | 54V 5A |
| Resfriamento | Refrigeração de ar local | Refrigeração de ar local |
| Outras funcionalidades | Atualizações OTA contínuas Controlador manual | Igual + suporte completo para desenvolvimento secundário (C/C++/Python, SDK, API) |
| Garantia | 8 meses | 18 meses |
| Uso pretendido | Geral / nível básico | Pesquisa, educação, IA avançada e desenvolvimento |
Observação: As especificações podem variar ligeiramente dependendo da configuração exata e das atualizações (especialmente para as versões educacionais). O robô é dobrável, potente e compacto, mas os usuários devem manter uma distância segura devido aos seus motores potentes e estrutura complexa.